
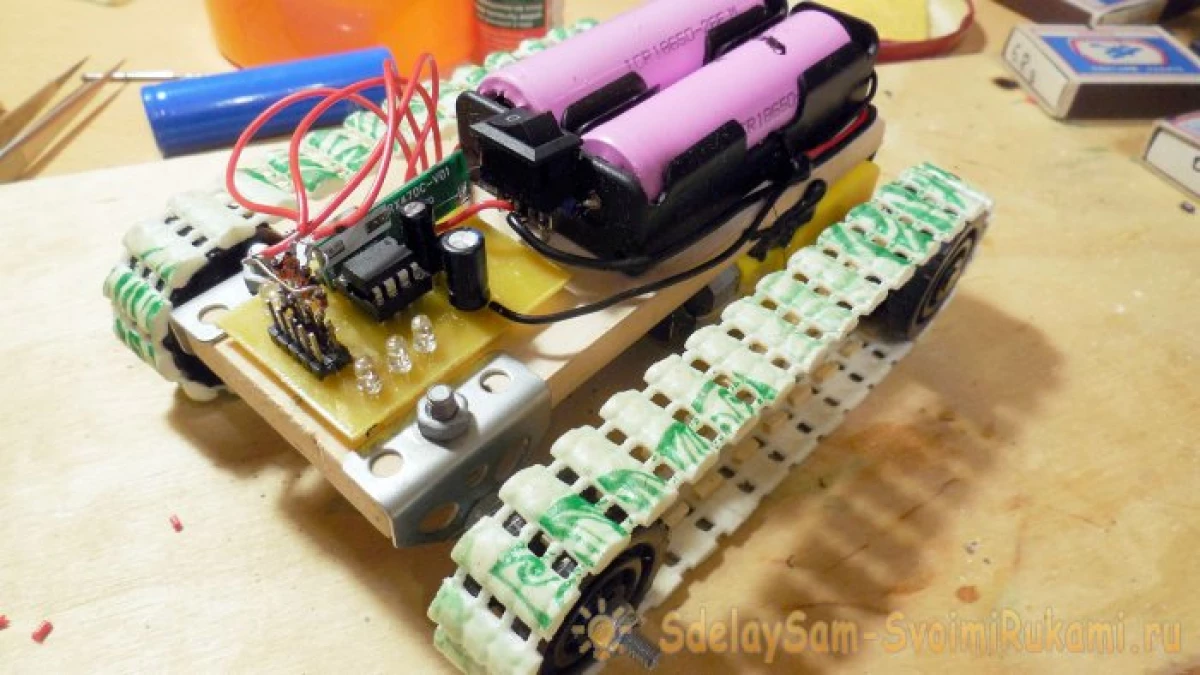
निष्पक्ष प्राथमिक डिजाइनको साथ एक प्रकारका एक प्रकारका एक टाइपराइटिक्षरको निर्माणलाई विचार गर्नुहोस् जुन भेला गर्न जुन तपाईं शाब्दिक रूपमा एक जोडी बेलुका लागि पूरै डिजाइन दुई भागमा विभाजन गर्न सकिन्छ - एक ट्र्याक गरिएको चेसिस र एक विद्युतीय भाग जसले टाढाको नियन्त्रणबाट मेशिनको दुर्गम भाग प्रदान गर्नेछ।
CHSSSIS निर्माण
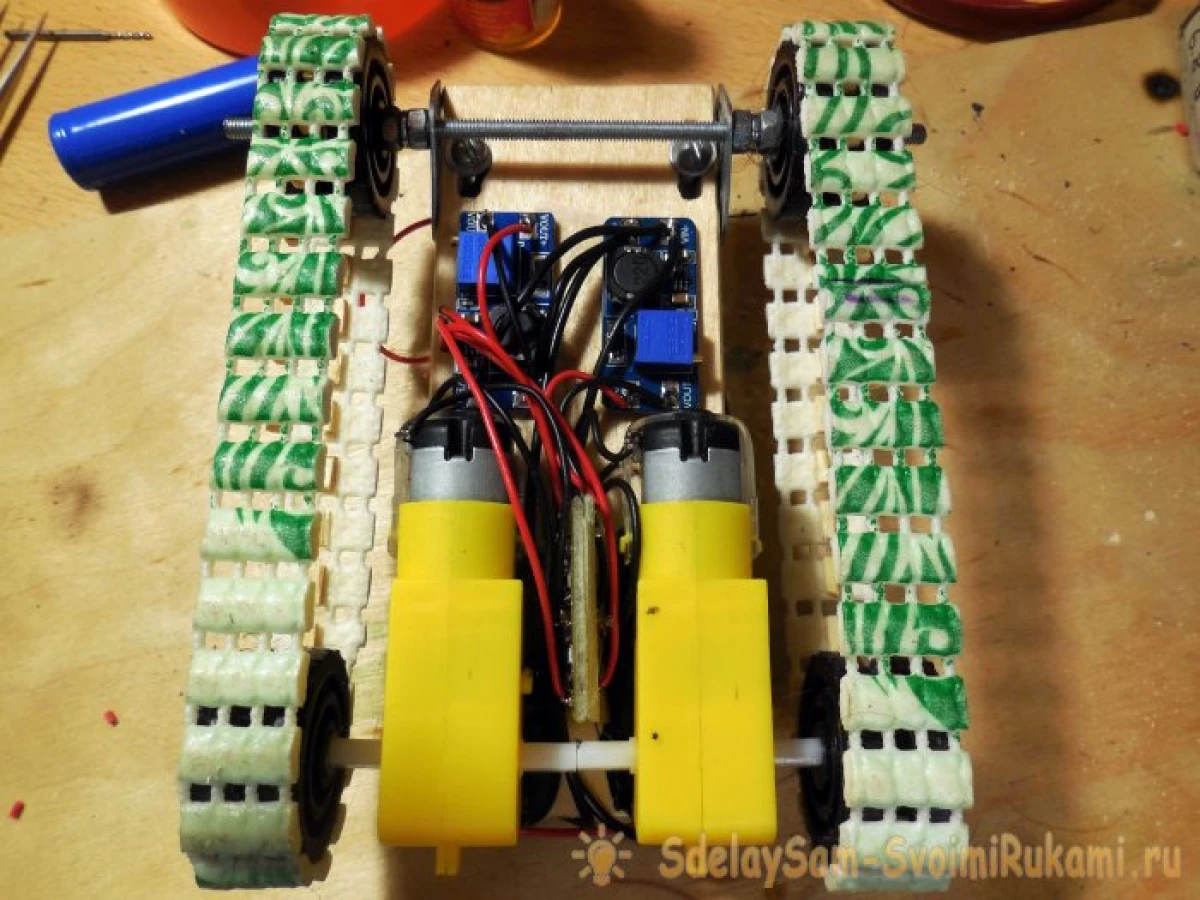
यो यति धेरै सामग्री छैन: क्याटरपिलर गियरबक्सहरूको एक जोडी द्वारा प्रेरित हुनेछ, सम्पूर्ण डिजाइन बाक्लो कटौती को एक सानो टुक्रा हुनेछ, जसलाई क्याटरपिलरहरू घुमाउनेछ। एक मेसिनको लागि, तपाईं लगभग कुनै पनि उपयुक्त गियरबक्सहरू प्रयोग गर्न सक्नुहुनेछ, आदर्श "पहेंलो", जुन रेडियो बस्तीमा फेला पार्न सकिन्छ, गियरबक्सले गियरबक्समा फेला पार्न सक्छ, जुन यस केसको लागि सबैभन्दा बढी हो इष्टतम मान।।
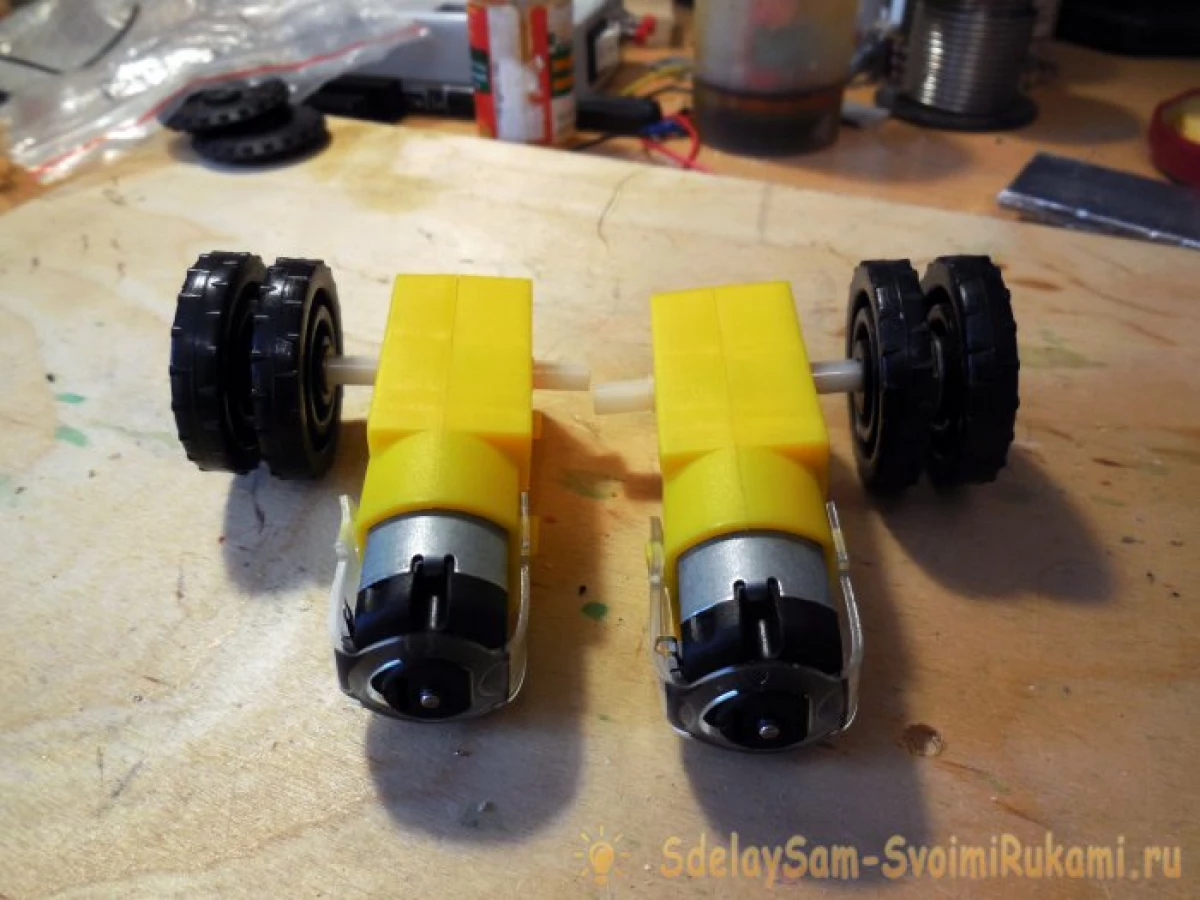
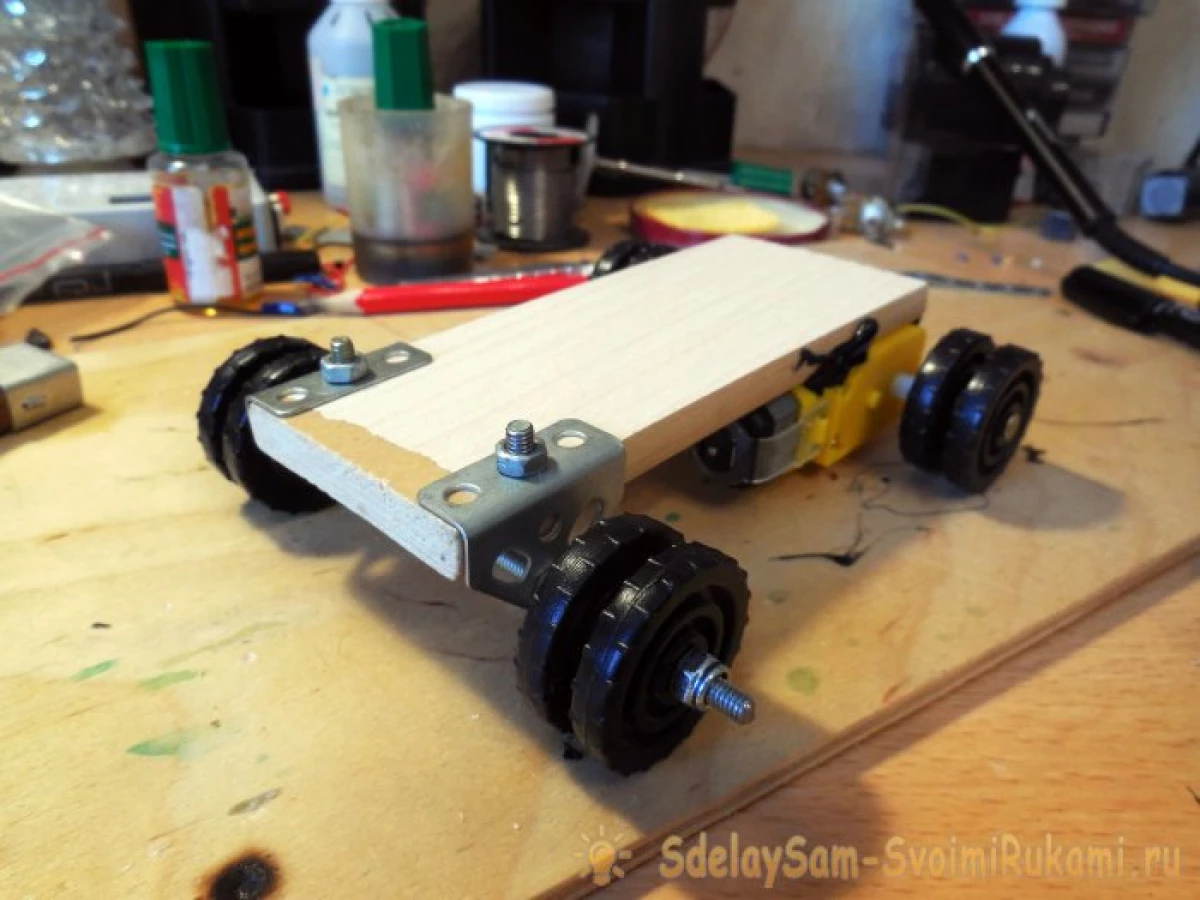
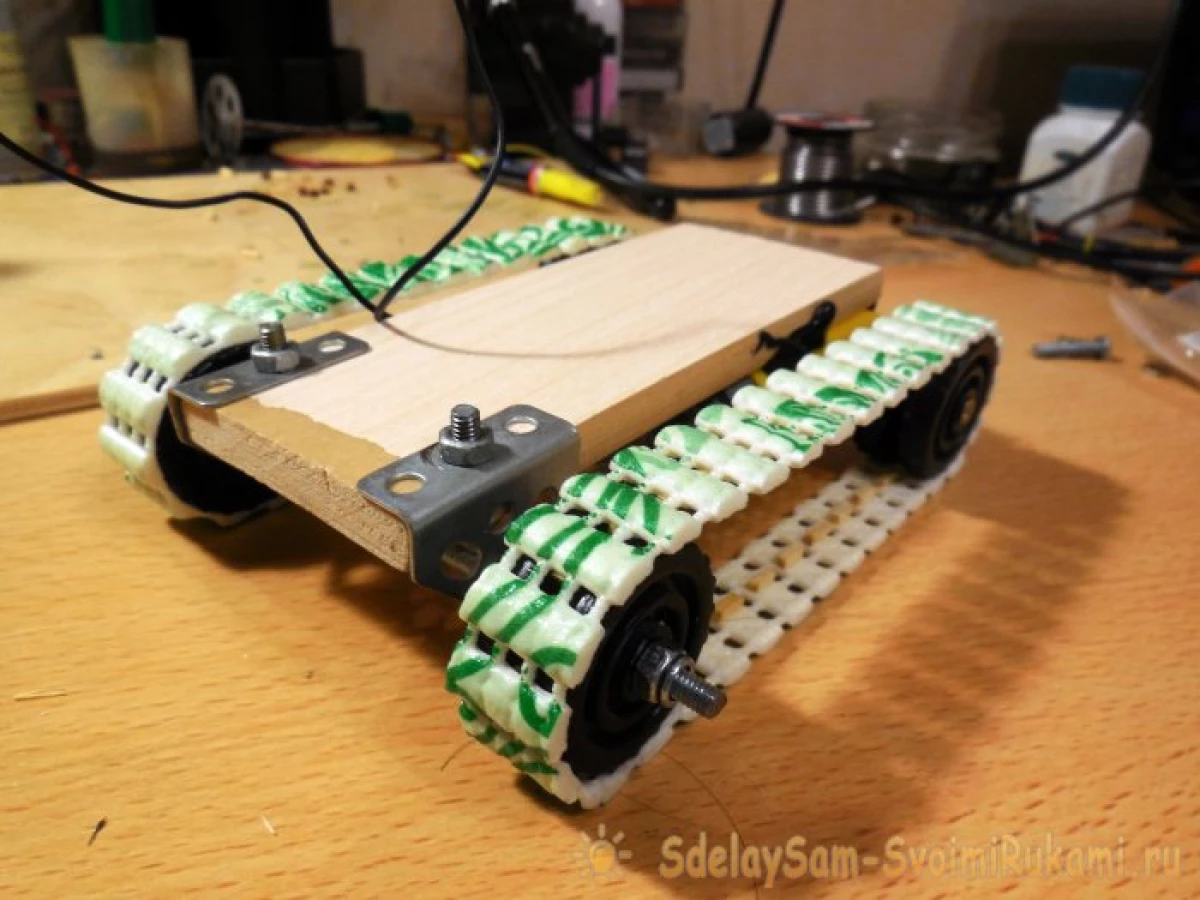
प्रत्येक गियरबक्ससँग दुई शाफ्टमा पहुँच छ, केवल एक शाफ्ट एक शाफ्ट सक्रिय हुनेछ, दोस्रो परियोजनाहरूमा यी परियोजनाहरू अझै आवश्यक छ भने। यो शाफ्टमा पा wheel ्ग्राहरूमा बाँच्नको लागि आवश्यक छ - यसलाई छिटो बनाउनको लागि, रूख आफैंमा स्क्रू समात्नुहोस् (यो भित्र भित्र पट्टि छ)। अतिरिक्त फिक्समेन्टको लागि, र क्रममा स्क्रूहरू नमाण्ड्न नपरोस्, तपाईं ग्लोरको सम्बन्धमा प्रशस्त मात्रामा प्रशस्त मात्रामा लम्बाइ गर्न सक्नुहुनेछ। कृपया नोट गर्नुहोस् कि पा wheel ्ग्रा डबल छ - त्यहाँ प्रत्येक पा els ्ग्रा बीचको एक अन्तर छ र यसमा क्याटरपिलर यससँग स्थिर हुनेछ।

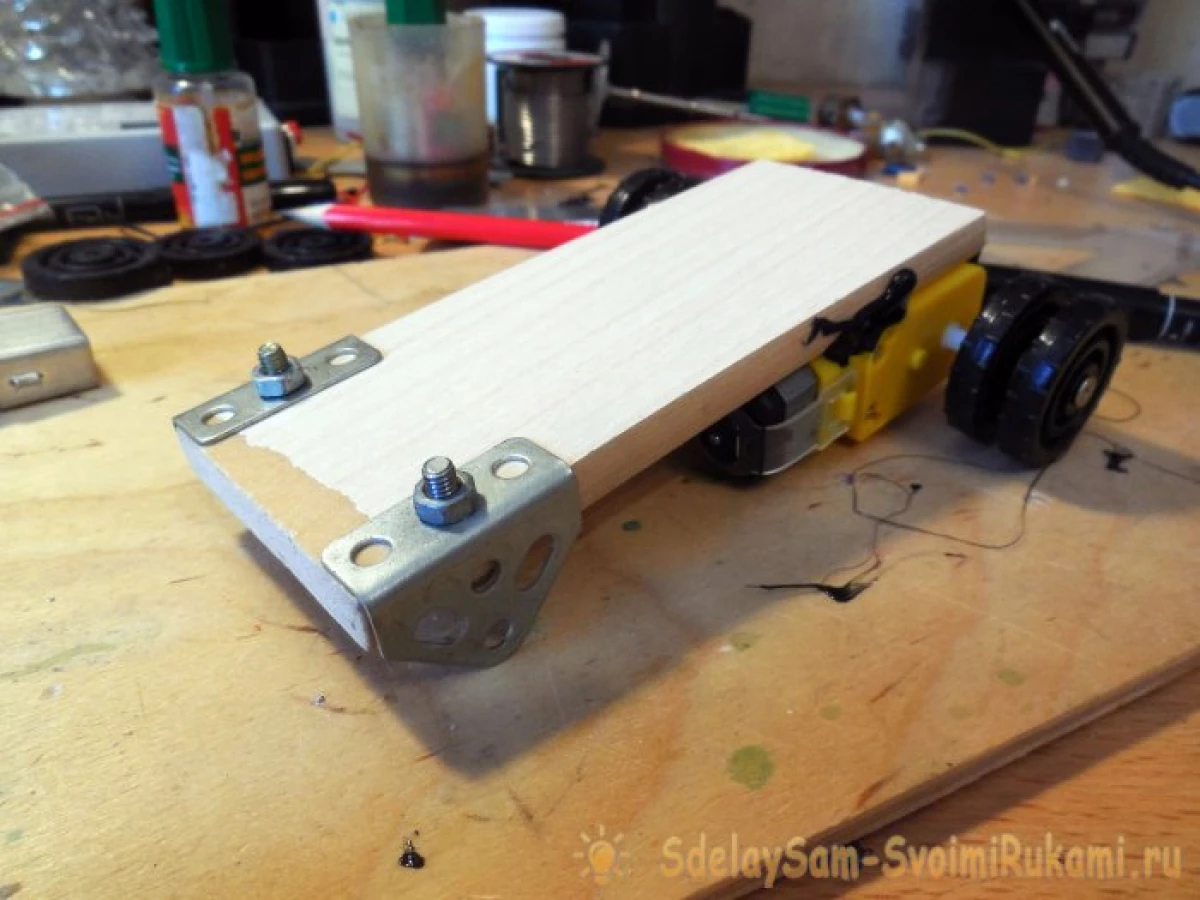
मोटर्स टिकाऊ प्लाइवुडको एक टुक्रामा तय गरिएको छ, यसको आकार मनपरात्मक रूपमा चयन गर्न सकिन्छ, मेशिनको इच्छित आकारमा निर्भर गर्दछ। यी गियर मोटर्सहरू बचत गरिएका सुविधाजनक स्थानहरू प्रदान गरिएको छैन, त्यसैले मैले तिनीहरूलाई थर्मोक्लास प्रयोग गरेर रेकर्ड गरे - राम्रो चिपकने रडहरूले देखाएझैं उत्कृष्ट गुणवत्ता कम्पाउन्डल,

अर्को, मोटरको विपरित पक्षमा, अगाडि पा whe ्ग्राहरूको अक्षको लागि कुनाहरूलाई सुरक्षित गर्न आवश्यक छ। यो गर्नका लागि, म बच्चाहरूको फलामको डिजाइनरबाट विवरणहरू प्रयोग गरेर सहजै सिफारिस गर्दछु - त्यहाँ तपाईं प्वालहरू सहित तयार कुनाहरू फेला पार्न सक्नुहुन्छ। जब प्लाइवडको प्वाल ड्रिल गर्दै, भविष्यमा यो खातिर आवश्यक छ कि यसले क्याटरपिलोज तनावको समायोजन गर्नेछ, त्यसैले 1-11.5 सेन्टीमिटरको लम्बाइसँग ड्रिल गर्न आवश्यक छ। त्यसपछि एक आयताकार स्लट मा मिलाउनुहोस्। यसैले, सम्पूर्ण फ्रन्ट अक्ष पछाडि सार्न चाहानुहुन्छ, बोल्टहरू इच्छित स्थितिमा ठीक छ।
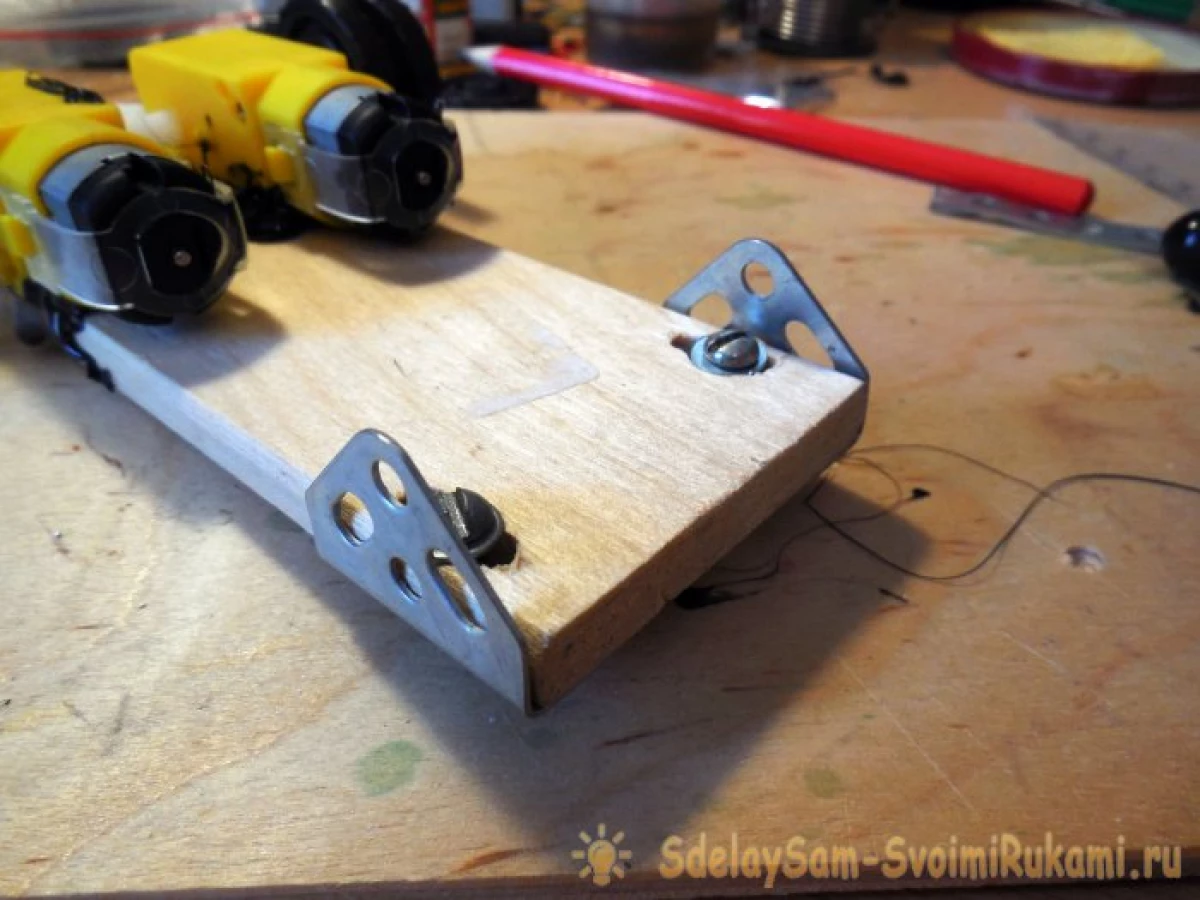
कुनामा प्वालमा प्वाल, यो M4 प्रयोग गर्न सजिलो हुन्छ, यसले पर्याप्त कठोरता दिन्छ र फलामको डिजाइनरका भागहरूमा प्वालमा उपयुक्त छ। कुनालाई कुनामा फाल्न गाह्रो हुनुपर्दछ, यो नटको लागि फिक्सनको साथ नट प्रयोग गर्न सजिलो हुन्छ, यदि मेशिन सवारी सुरु हुन्छ भने उनीहरू आफैंलाई काट्दैनन्। तर्फ, उही डबल व्हीलहरू पछाडिको रूपमा स्थापित छन्, ठीक समान अन्तरको साथ। पा the ्ग्राहरूले सित्तैमा अक्षमा घुमाउनु पर्छ, यो सम्भव नट द्वारा निर्धारणको साथ समान नट द्वारा प्रदान गर्न सम्भव छ। कृपया नोट गर्नुहोस् कि बाँया र दायाँ पा wheel ्ग्राहरूले एक अर्काको स्वतन्त्र रूपमा घुमाउनु पर्छ। त्यस्ता पा els ्ग्राहरू मैले एकै फलामको डिजाइनरलाई लिएँ, तर तपाईंले दुबै प्लास्टिकको समान काटिन सक्नुहुन्छ, वा बाक्लो गेटबोर्डबाट, यदि तपाईं यसलाई धेरै तहहरू र गोंदमा डुबाउनुभयो भने।

क्याटरपिलरको निर्माण
यो कल्पना गर्न गाह्रो छ, तथापि, राम्रो क्लचको साथ उत्कृष्ट क्याटरपिलहरू pvc स्नान रगबाट प्राप्त हुन्छन्, तपाईं यसलाई घरेलु सामानहरूको लगभग कुनै पसलमा फेला पार्न सक्नुहुनेछ। यस्तो रगमा विभिन्न प्रकारका लचिलो "स्ट्रिपहरू हुन्छन्, जुन समानान्तर थ्रेडहरूले आपत्विब्दिकहरूद्वारा एकसाथ मिल्छ, क्याटरपिलर सिर्जना गर्न के आवश्यक छ। रिबन रिबनलाई 1. 1.5-2 सेन्टीमिटको चौडाइको साथ काटिएको छ, यो प्रयोग हुने पा the ्ग्राहरूको चौडाइ बराबर हुनुपर्दछ।

त्यसोभए चाजिसमा जोडिएको पा the ्ग्राहरूमा टेप संलग्न गर्न र आवश्यक लम्बाइमा यसलाई काट्न आवश्यक छ, तब रिबनको टुप्पोमा सुँगुरको साथ चित्रित छन्। गोंद सुख्खा पछि, तपाईं चेसिमा क्याटरपिलर प्रयास गर्न सक्नुहुनेछ र मोटर भर्नुहोस् - क्याटरपिलरले घुमाउनेछ, तर यो पा the ्ग्राबाट चाँडो झर्नेछ।
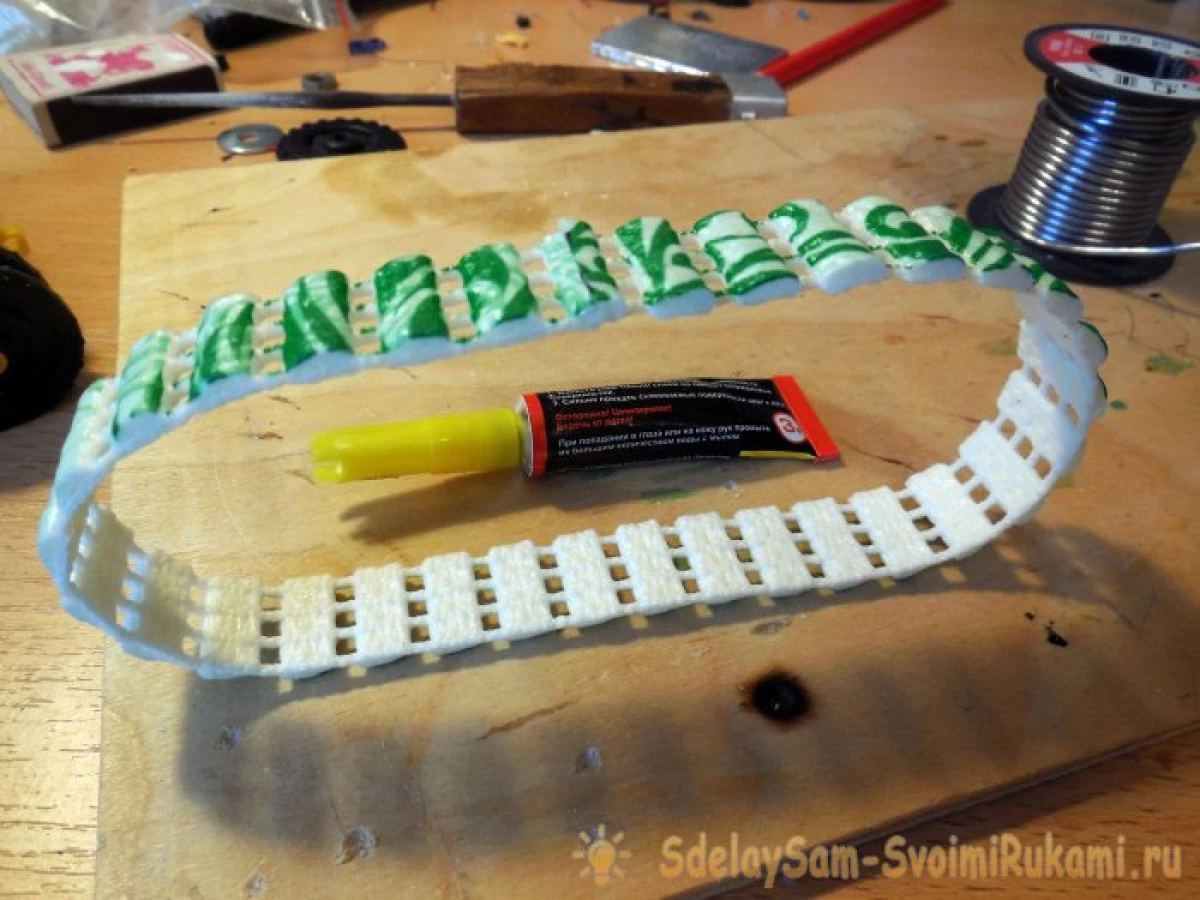
यसमा क्याटरपिलरलाई पा whe ्ग्राबाट झर्नुहुन्न, जब भावी मेशिनले अवरोधहरू सार्न सक्छ, तपाईंले क्याटरपिलरको बीचमा फ्याँक्नु पर्छ। घुमाउँदा, तिनीहरू पा els ्ग्राहरूको बिचमा अन्तर खानेछन्, क्याटरपिलर टाढा जानको लागि। तपाईं धेरै तरिकामा रोक्ने तरिकाहरूमा स्टपहरू बनाउन सक्नुहुन्छ, मैले क्याटरपिलरको प्रत्येक "चरण" को लागी टाँस्ने निर्णय गरें, किनकि अनुभवले देखायो, यस विधि एक कामदार भएको थियो र पर्याप्त तनाव भयो। तल फोटोमा देखाइएको जस्तो फोटोमा देखाइएको जस्तो खेलको स of ्ख्यामा खेलहरू काटियो, जुन सबै समान सुपरकचलकरहरू प्रयोग गरिन्छ - यसले पीवीसीटी म्याट सामग्रीको जडानको लागि राम्रो शक्ति सुनिश्चित गर्दछ।

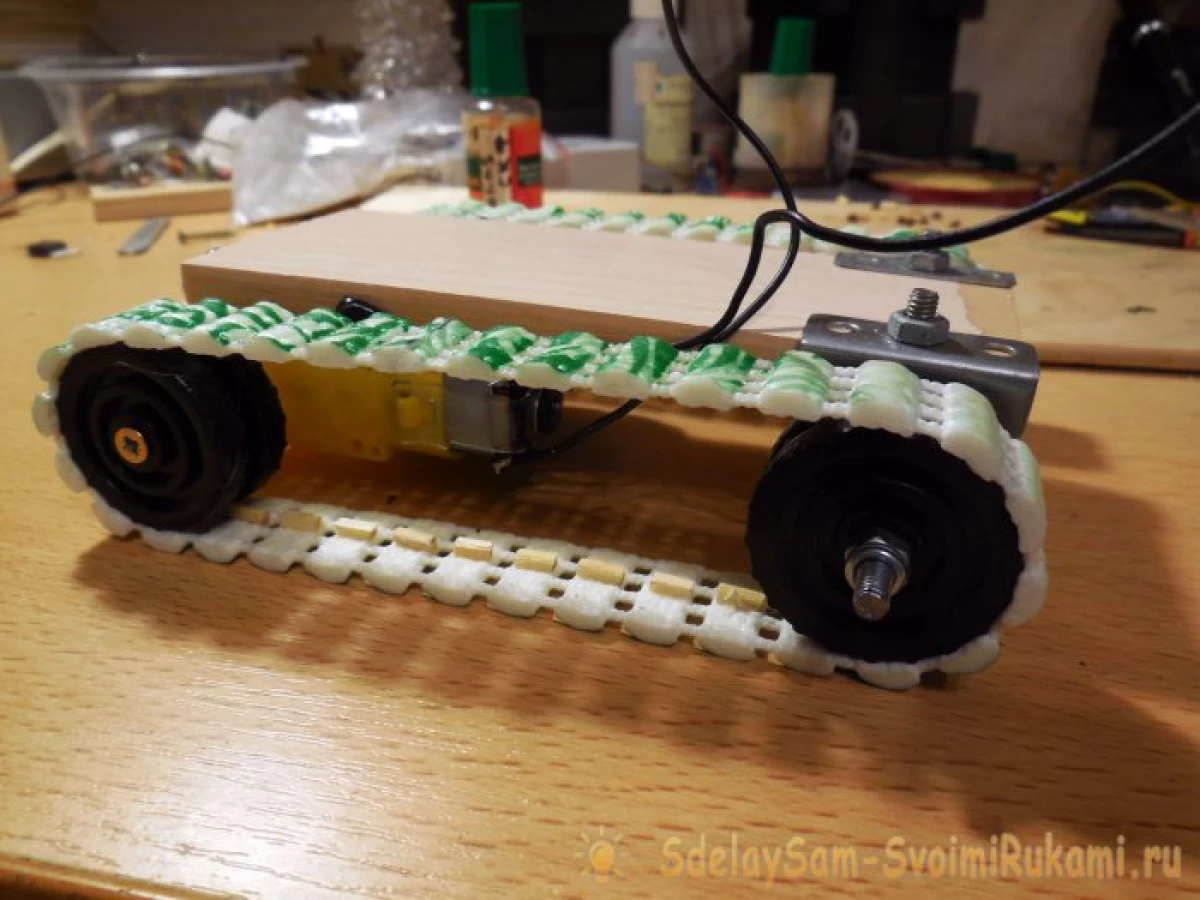
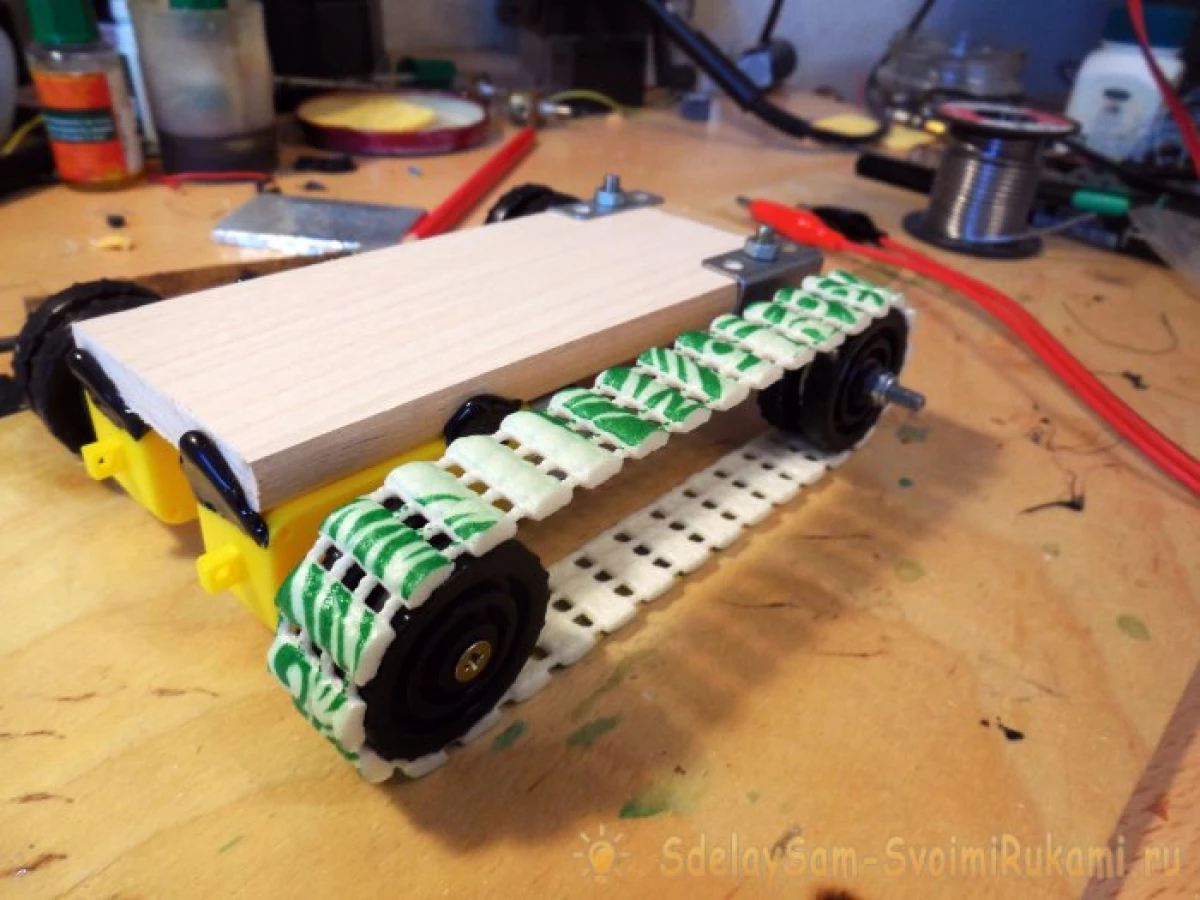
सबै समान कार्यहरू दोस्रो क्याटरपिलरको साथ गर्नु पर्छ। क्याटरपिलरहरू टाँडिं, तपाईं तयार पढ्न सक्नुहुन्छ - अब तिनीहरू चाजसमा आशा राख्न सक्छन् र भविष्यका मेसिन कसरी दुबै मोटर भोकलाई सिधा खुवाइन्छ। यदि आवश्यक छ भने तनाव शक्ति समायोजित गर्न आवश्यक छ - कम कमजोर छ कि क्याटरपिलरले यसलाई बाहिर वा अनुदान रोकिनेछ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, मोटर मा एक अतिरिक्त लोड भएको छ, एक अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त लोड भएको छ, मोटर मा अतिरिक्त भार लिएर।
विद्युतीय भाग
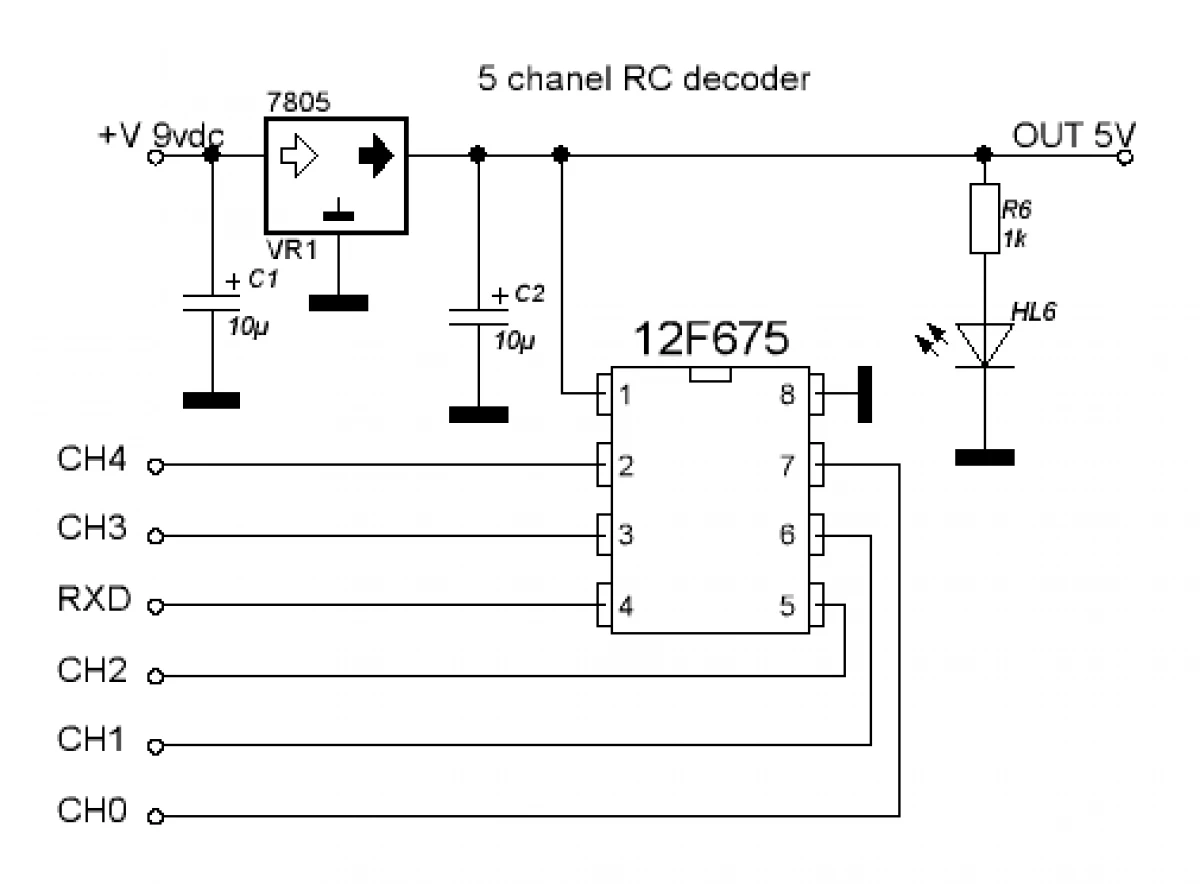
विद्युतीय भागमा, धेरै बोर्डहरूमा आवश्यक हुनेछ: रिमोट कन्ट्रोलबाट कमाण्डहरू सार्चातका लागि रिसीभर र ट्रान्समिटर कार्डहरू जसले मोटर्सहरूलाई घुमाउनको लागि रूपान्तरण गर्ने बोर्डहरू हुन्छन्। दुबै दिशामा। सामान्य योजनाहरू यस्तो छ - त्यहाँ ट्रान्समिटर बोर्ड स्थापना गर्नुहोस्, रिसेक्टर चार्समा रिसीभर बोर्ड। बढ्दो रूपान्तरणहरूले भोल्टेज ब्याट्रीबाट रूपान्तरण गर्दछ (.2..2.2 भोल्ट) 7-8 भोल्टमा -8-। भोल्टहरू, जसबाट मोटोटहरूले पहिले नै खानेछ। यदि मोटलले पर्याप्त गति र सीधा ब्याट्रीबाट विकसित गर्दछ भने, ट्रान्सड्युडकर्ताहरू स्थापना हुन सक्दैन। मोटर रोटेशन बञ्चुर्जहरू प्राप्त गर्ने छ - क्षेत्र ट्रान्जिटरको साथ विशेष योजनाहरू जसले भोल्टेज वा एक ध्रुवीयतालाई आपूर्ति गर्न सक्दछ, वा अन्य interm मा निर्भर गर्दछ (1 वा 1 मा) on मा निर्भर गर्दछ। सुरुमा हामी ट्रान्समर र रिसीजरको योजनाहरू विचार गर्दछौं, ती क्रमशः प्रतिनिधित्व गरीन्छ।
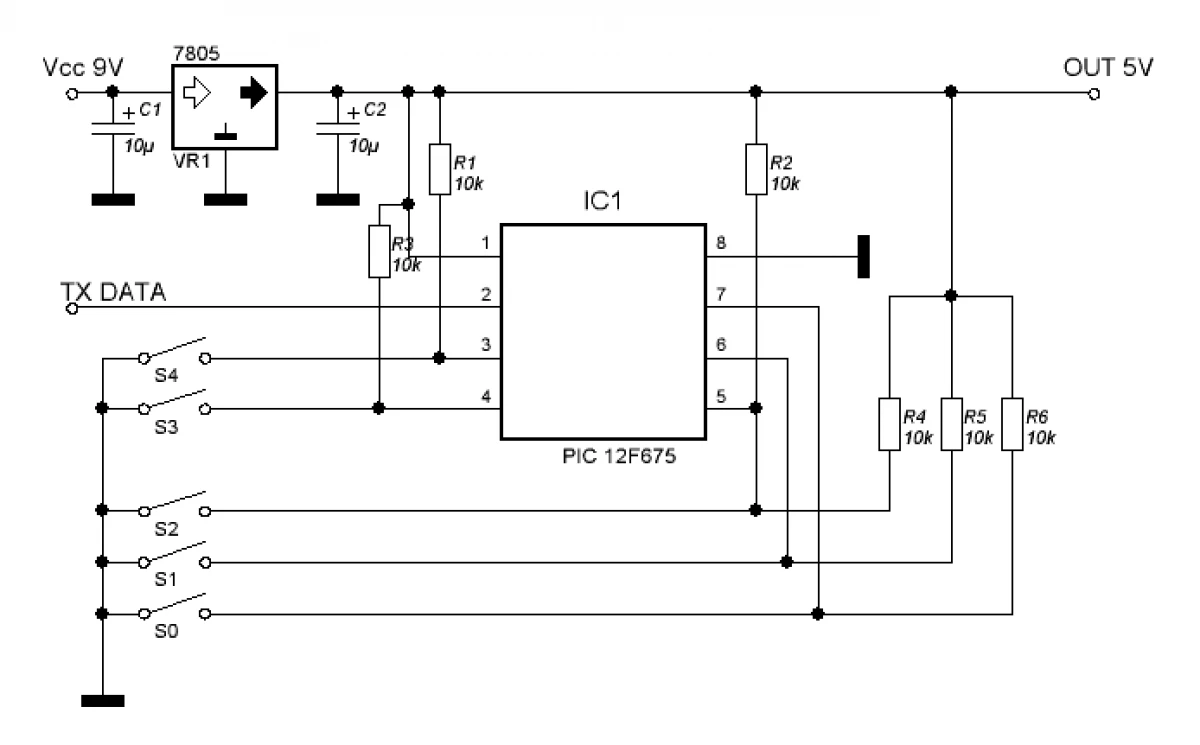
सही हुन, यी सर्किटहरू ईन्कोडर र डिपोडर र डिस्ट्रो र ट्रान्समिटर र ट्रान्सफर-टीएक्स मोड्युलहरू हुन्, जुन सजिलैसँग रेडियो कम्पोनेन्टहरूको धेरै भण्डारहरू छन् -
प्रत्येक मोड्युलमा जडान - प्लस पावर, माइनस, साथै प्रसारण वा डाटासेटको लागि डाटा सम्पर्क गर्नका लागि तीन सम्पर्कहरू छन्। माथिको साधारण योजनाहरूले डाटा ट्रान्सफर प्रोटोकल प्रदान गर्दछ, तपाईंलाई 5 बटनहरू थिच्न मद्दत गर्दछ। टाइपराइटरलाई नियन्त्रण गर्न, तपाईंलाई केवल च्यानल मात्र (अगाडि, पछाडि, दायाँ, बाँया) चाहिन्छ, त्यसैले 5th औं च्यानल निःशुल्क रहन र कुनै लक्ष्यमा प्रयोग गर्न सकिन्छ, उदाहरणका लागि। TXD र RXD सम्पर्कमा RXD सम्पर्कहरू ट्रान्समिट र रिसीभरको डेटा डाटा, बाँकी योजना, सरल र कडाईको आवश्यकता पर्दछ। योजनाहरूको आपूर्ति भोल्टेज, तथापि, यदि तपाईंले 78 78l05 स्थिर (तिनीहरू सेटअप छन् भने, त्यसो भए तपाईं भोल्टेज 7 वा थप भोल्टबाट लिफ्ट गर्न सक्नुहुन्छ। प्रिन्टिंग बोर्डहरू दुबै विकल्पहरू प्रदान गर्दछ, तपाईंले मात्र सही स्थानहरूमा जम्पहरू स्थापना गर्नु आवश्यक छ। मेशिन, पावर र रिसीभरमा प्रयोगको लागि, र ट्रान्समिटरको प्रयोगलाई सिधा स्ट्रिटरहरू बिना पछाडि गर्न सकिन्छ। प्रत्येक योजनामा त्यहाँ एक माइक्रोकोन्ट्रोलर हो - यो व्यवस्थित फर्मवेयरसँग फ्ल्याश हुनुपर्दछ, फर्मवेयर बोर्डका फाईलहरू सहित अभिलेखमा छ।
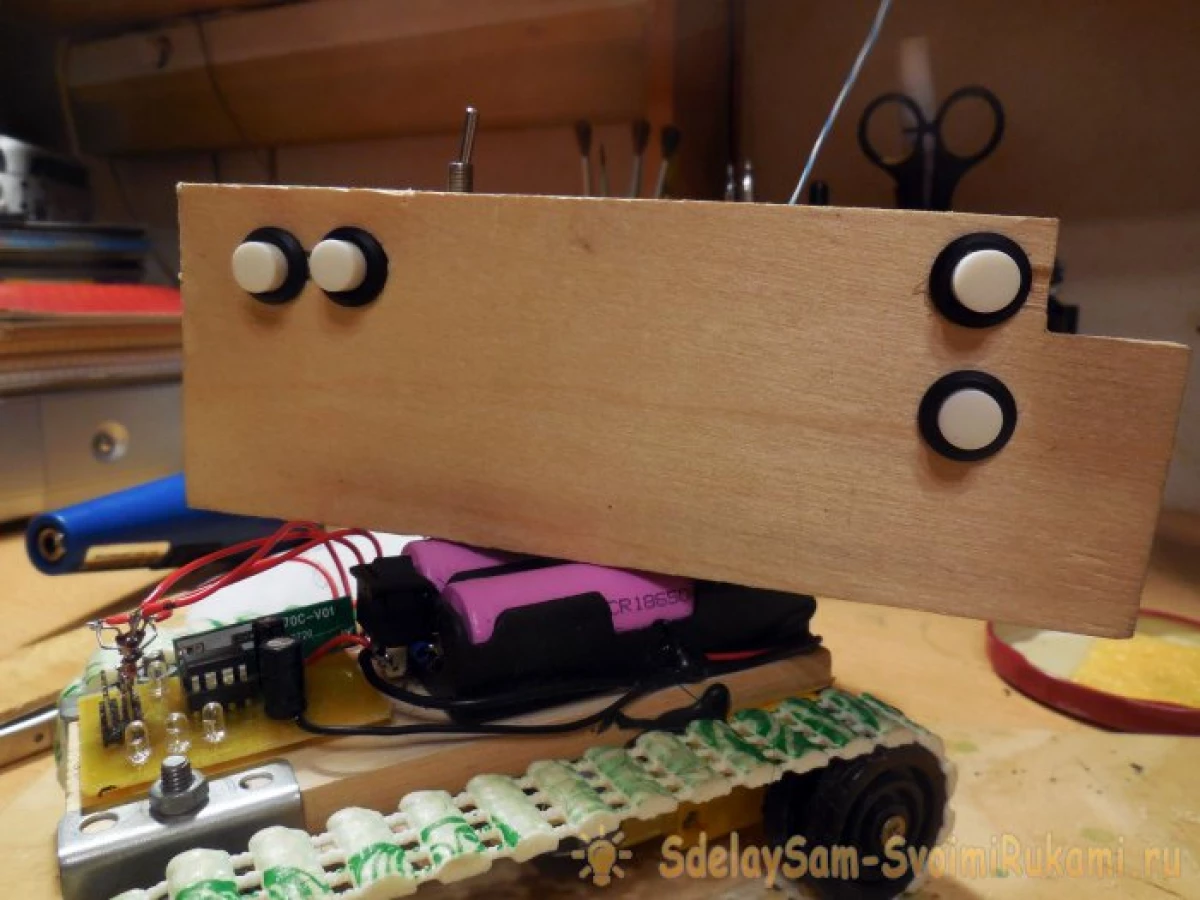
कन्सोलको निर्माण
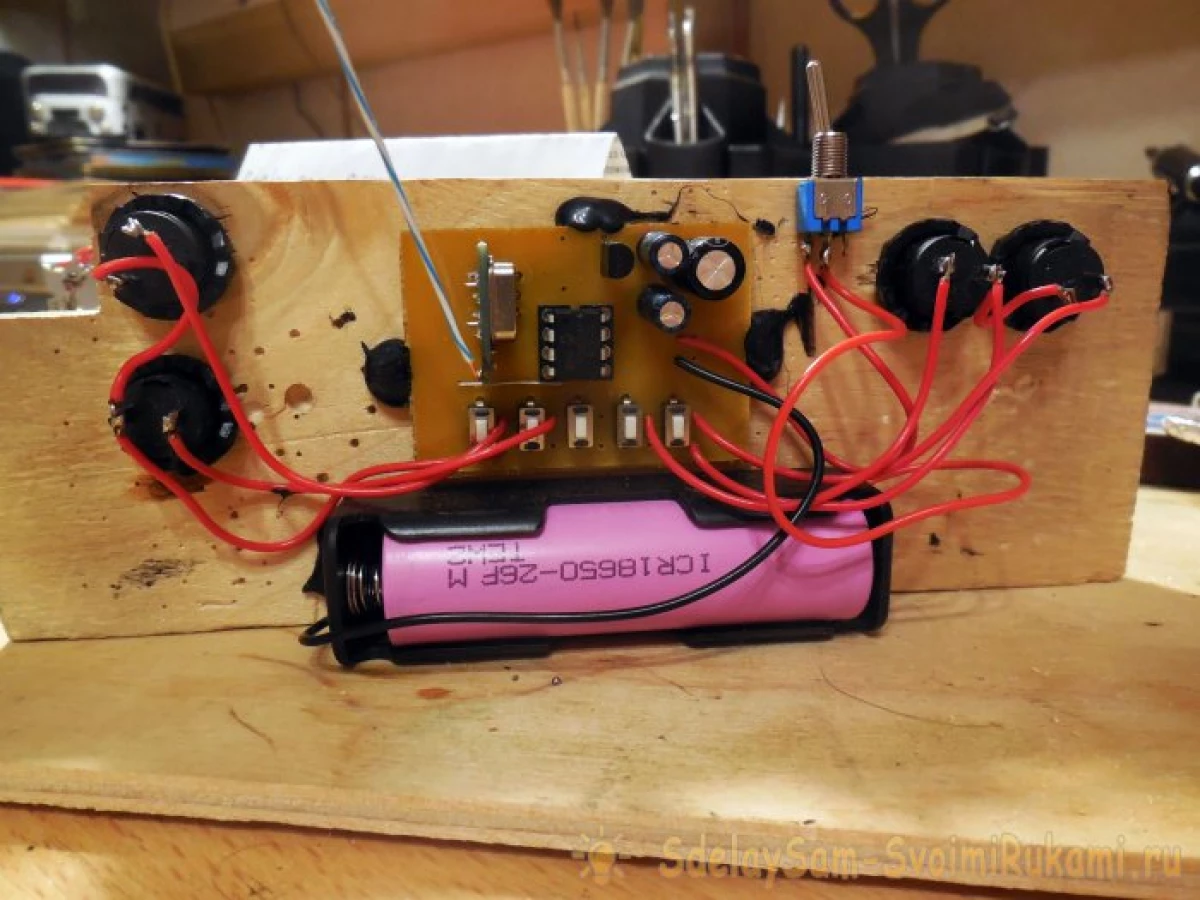
विकल्पहरू मध्ये एकको रूपमा, तपाईं केही भाँचिएको / अनावश्यक रेडियो-नियन्त्रित खेलौनाबाट समाप्त गर्न सक्नुहुनेछ यदि ईन्कोडर बोर्ड स्थापना गर्न त्यहाँ पर्याप्त ठाउँ छ भने। वा तपाईं आफ्नो आफ्नै टाढा, गर्न सक्नुहुन्छ, जस्तो मैले गरे। आधारको रूपमा, प्लाइवुडको अर्को चोटपटक लाग्थ्यो, ब्याट्री 1 186500 को लागी, एक रिसीभर मोड्युल को साथ, कोडर शुल्क को साथै 4 बटनहरु लाई अधिकतम गर्न को लागी। कृपया नोट गर्नुहोस् कि CODER बोर्ड पहिले नै बोर्डका लागि बोर्ड स्थल भाषाहरू समावेश गर्दछ - तिनीहरूको स्थापना सभामा परीक्षणको लागि जाँच गर्न बाहेक। अपरेटिंग बटनहरू तारहरूमा बोर्डबाट प्रदर्शित हुन्छन्, तलका फोटोहरूमा।
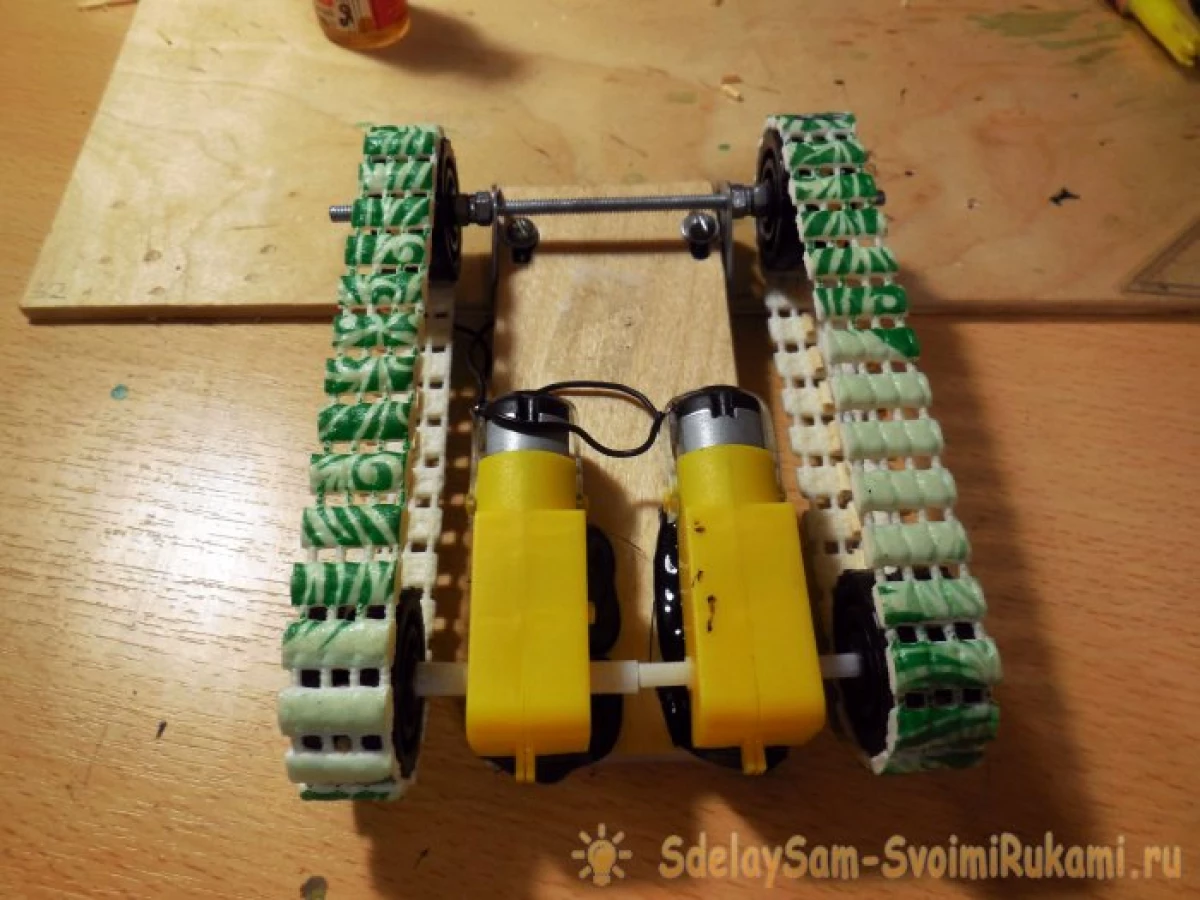
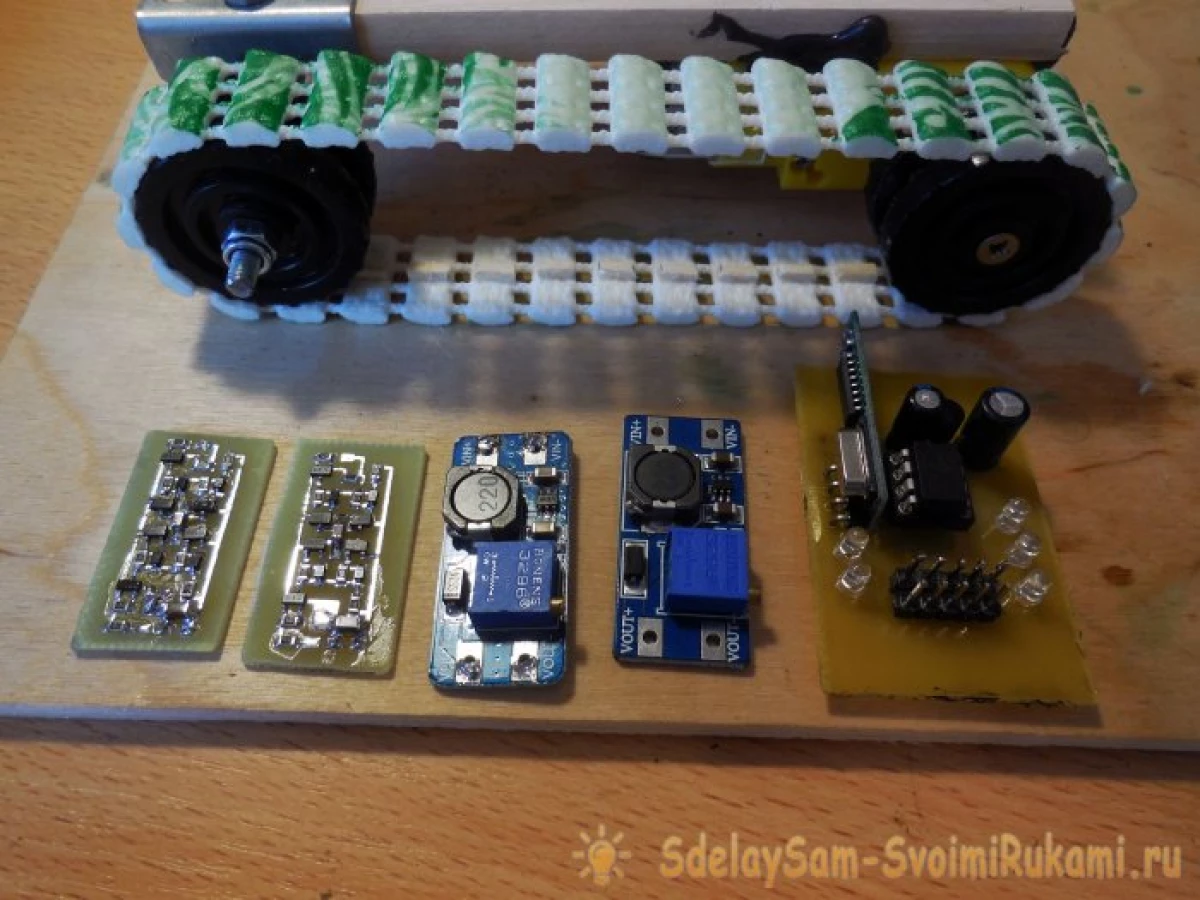
चेसिस मा इलेक्ट्रोनिक्स को स्थापना
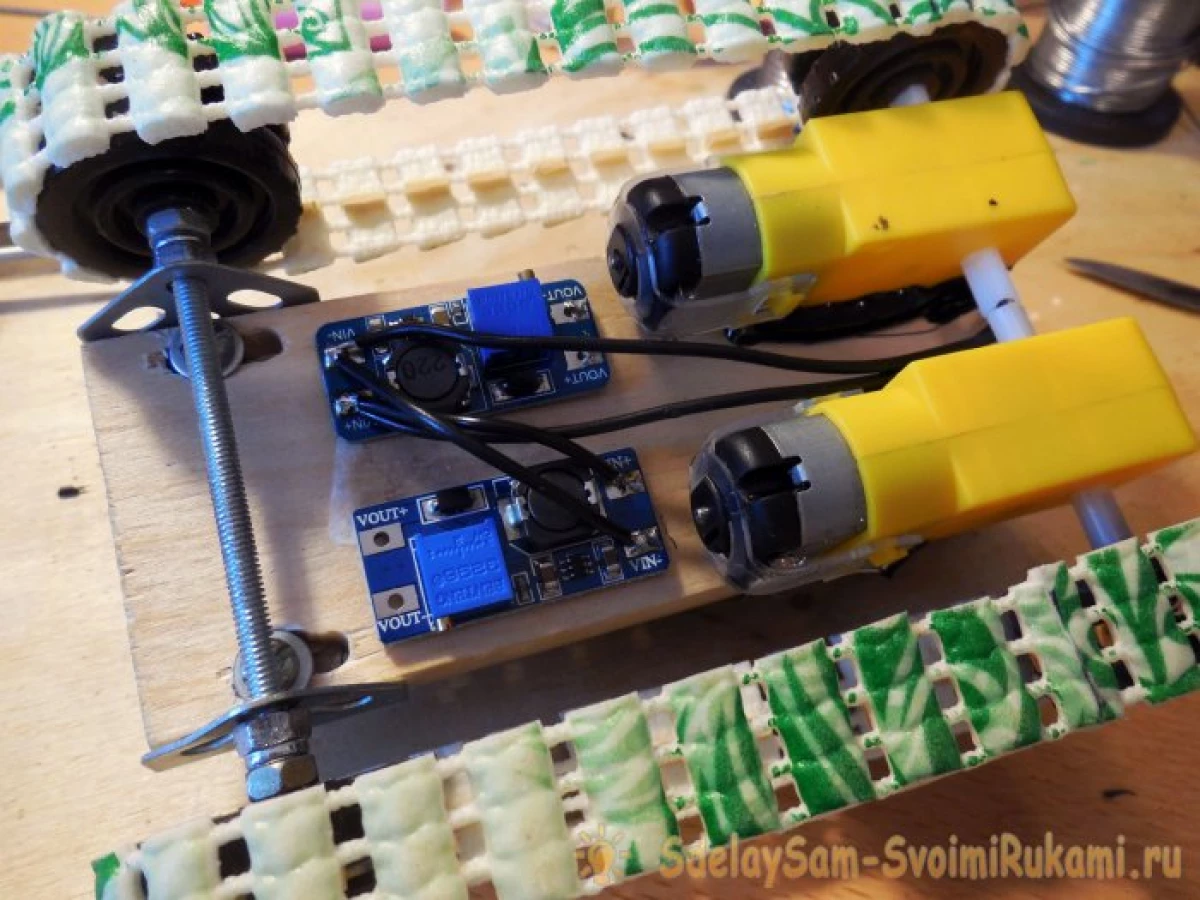
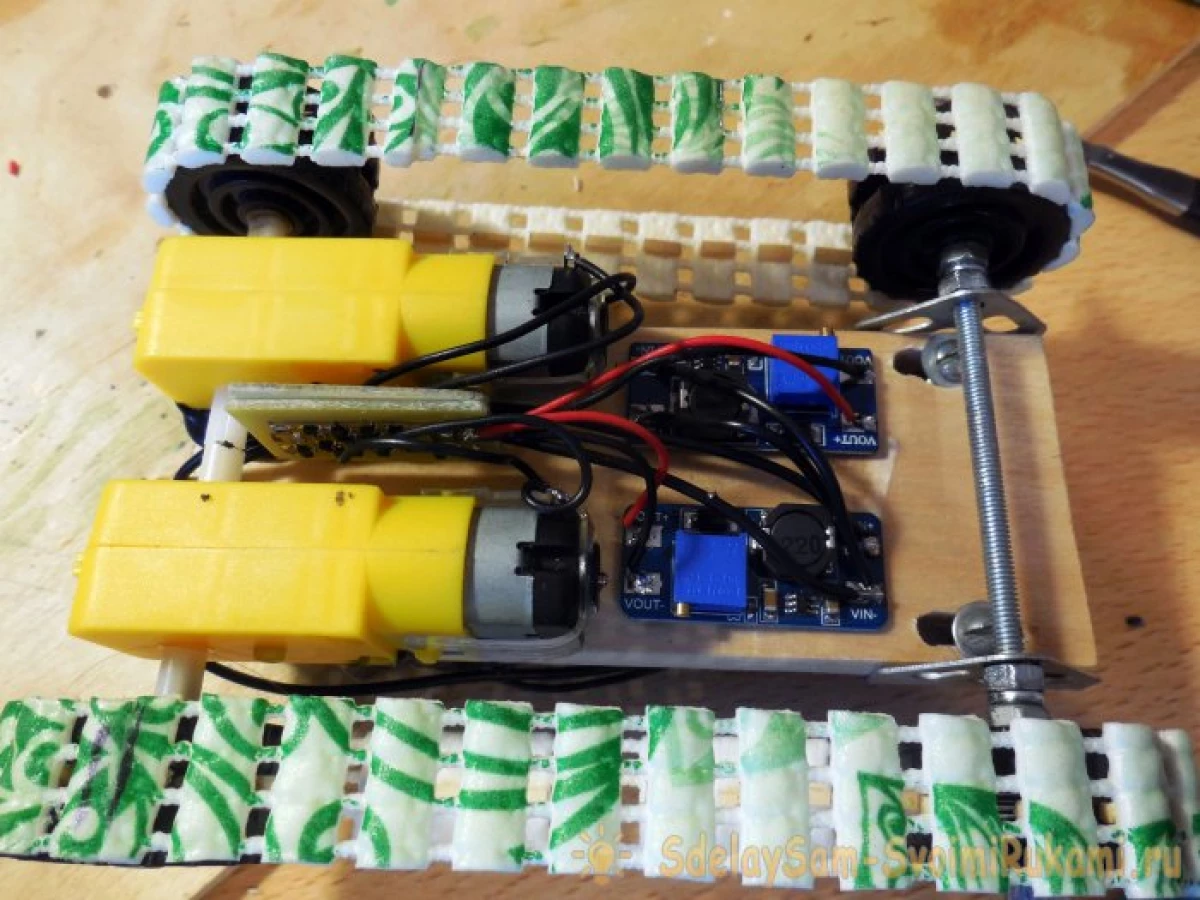
चेसिस आफै, यसैले एक रिसीभर मोड्युलको साथ डिस्डर डाउडको बाहेक दुई "पुल" बोर्डहरू स्थापना हुनेछ, र दुई रूपान्तरणहरू। दुई रूपान्तरणकर्ताहरूको प्रयोग, प्रत्येक मोटरका लागि एक एक गरेर, राम्रो छ किनकि प्रत्येक क्याटरपिलरको गति समायोजन गर्न सम्भव छ। मोटर गिल, यद्यपि उस्तै, तर पनि, उही फीड भोल्टेज संग केहि भिन्नताहरु छन्, यसले अथाह क्रान्तिहरू समायोजन गर्न सक्दछ, रूपान्तरणकर्ता आउटपुटमा संलग्न गर्न सक्दछ। स्कीट्सको गतिमा स्कीटकी, सानो पनि, सानो, यो तथ्यलाई पुष्टि गर्दछ कि मेशिन अगाडि बढ्नेछैन, तर सानो मोडको साथ। तपाईं तल चेसिसका लागि स्थापनाका लागि आवश्यक सबै बोर्डहरू हेर्न सक्नुहुन्छ।
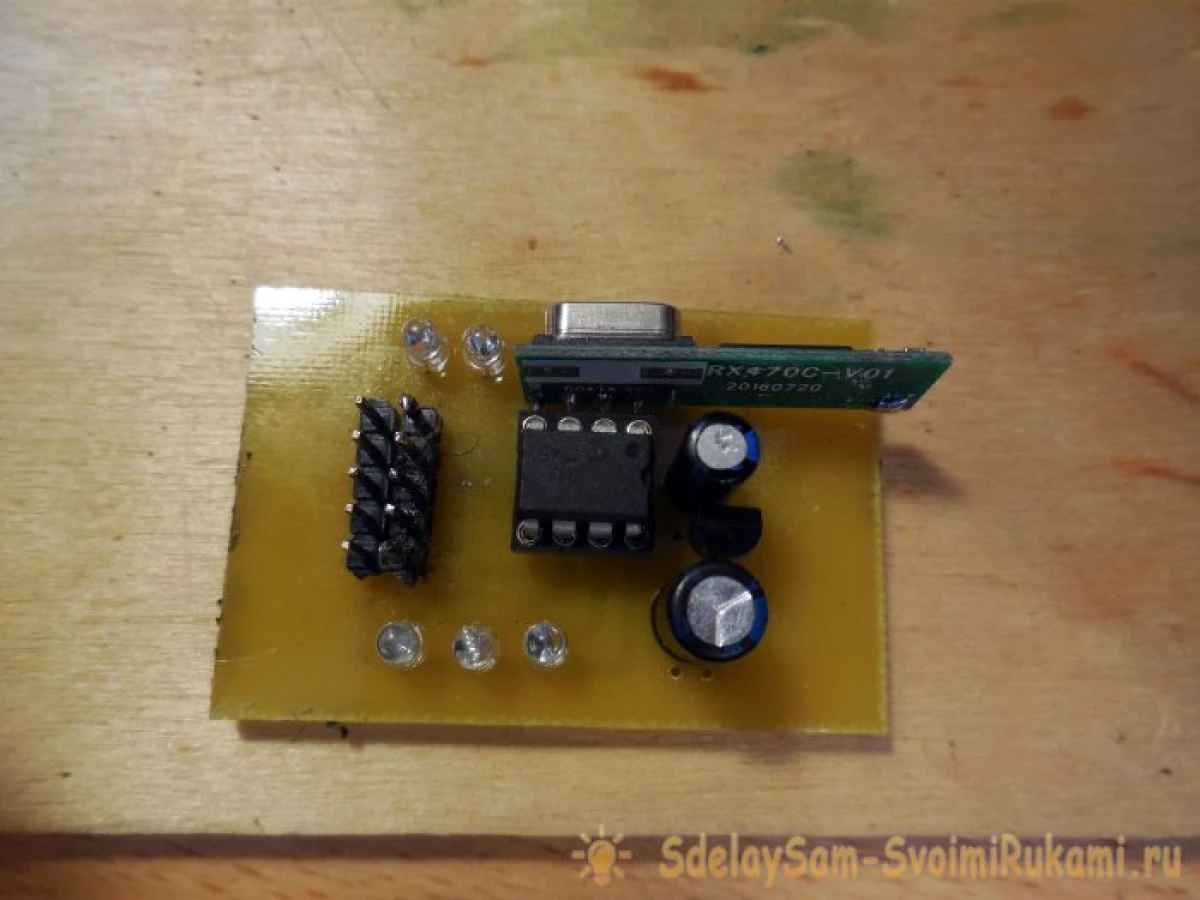
डिपोडर बोर्डको विस्तृत फोटो। कृपया नोट गर्नुहोस् कि यो, CODER बोर्ड जस्तै, धेरै अतिरिक्त पावर क्यापिकाटरहरू छन् - उनीहरू निश्चित रूपमा माइक्रोकन्ट्रोलरहरूको साथ उपकरणहरूमा अवैध हुनेछैनन्।
एक ब्रिज योजना बनाउनुहोस्
यो देखिन्छ - जसको लागि केही प्रकारको पुल आवश्यक छ किनकि मोटरमा भोल्टेज आपूर्ति गर्नको लागि कुञ्जीको सहयोगमा मात्र पर्याप्त छ। र उनी वास्तवमै आवश्यक पर्दैन यदि टाइपराइटर रिभर्स उल्लंघन गरिएको छैन - र अभ्यासले देखाउँदछ कि यो पूर्ण रूपमा अनौंठो हुँदैछ। तसर्थ, एउटा सानो अतिरिक्त योजना भेला गर्न आवश्यक छ, जसले मोटरको दुध परिवर्तन गर्नेछ। ध्रुवीयता परिवर्तन - आन्दोलन को दिशा परिवर्तन।
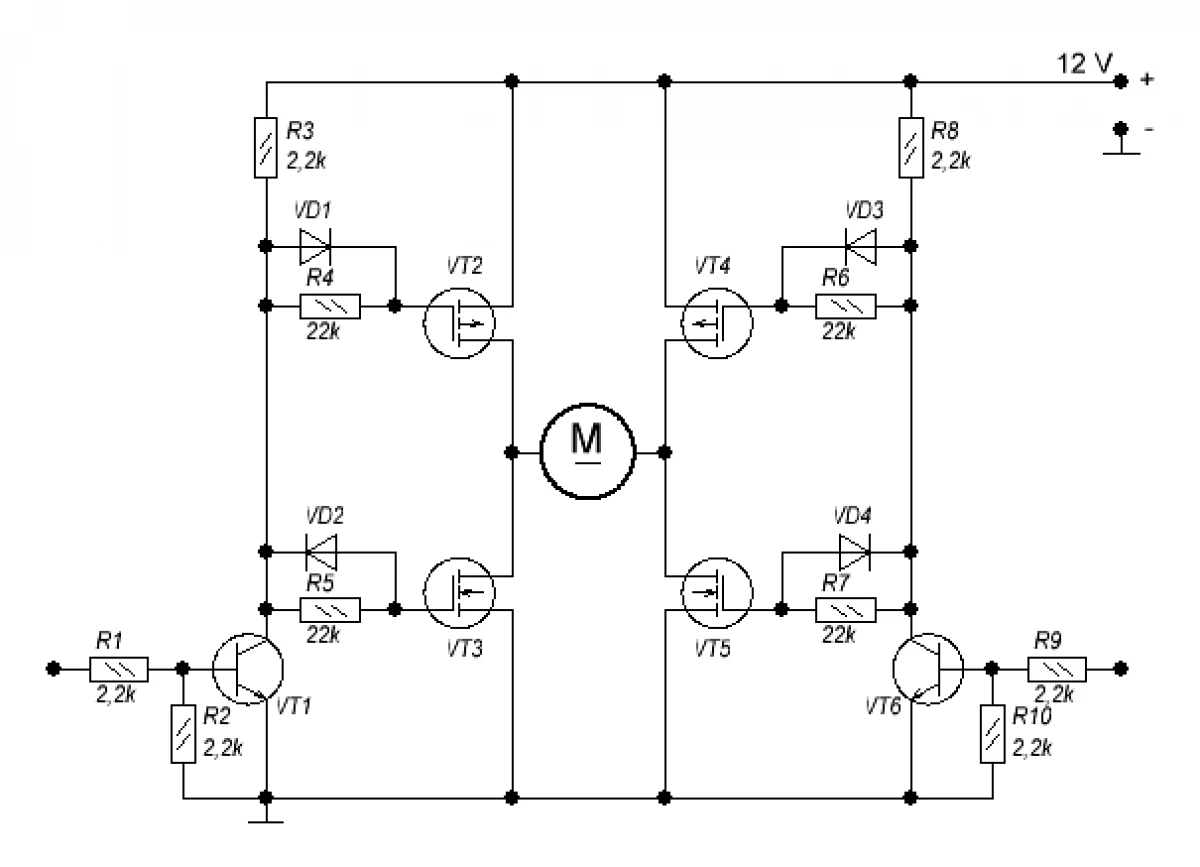
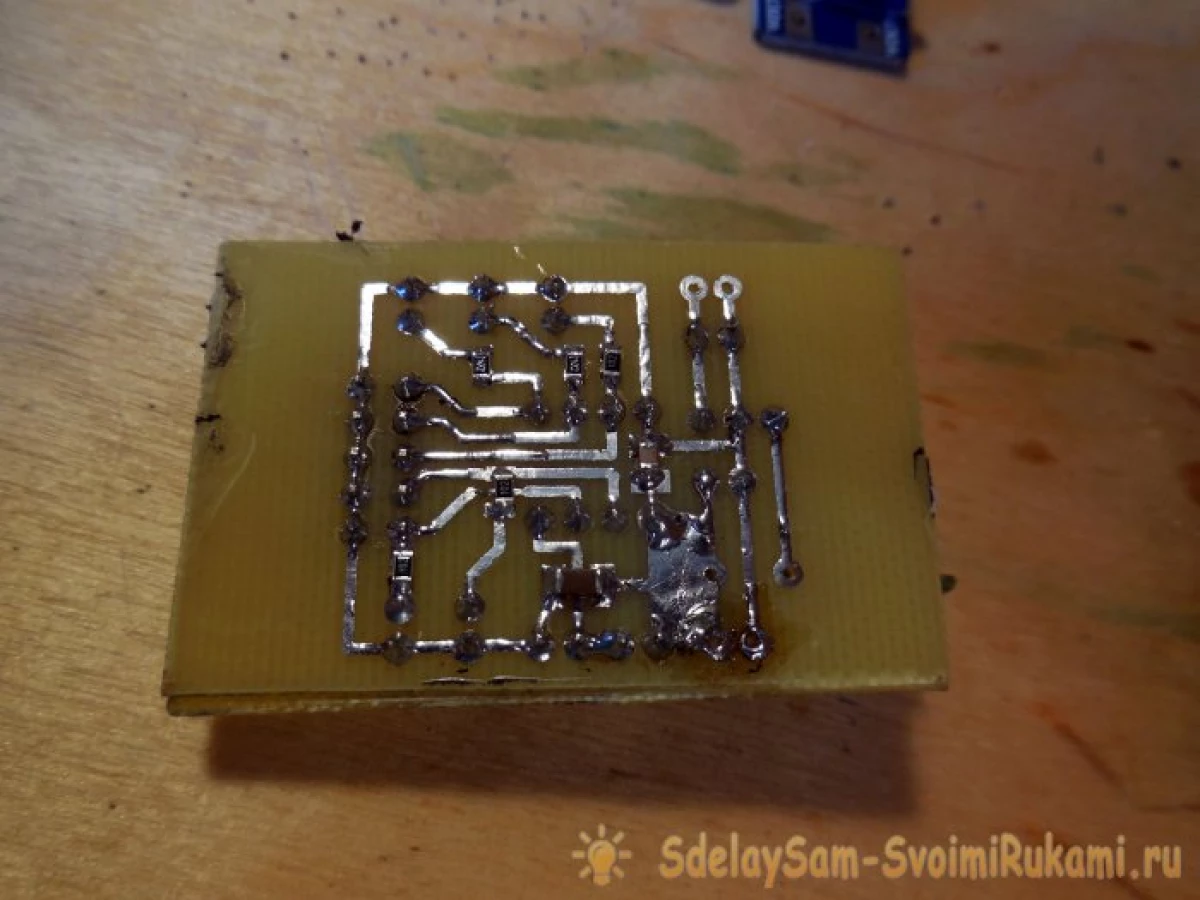
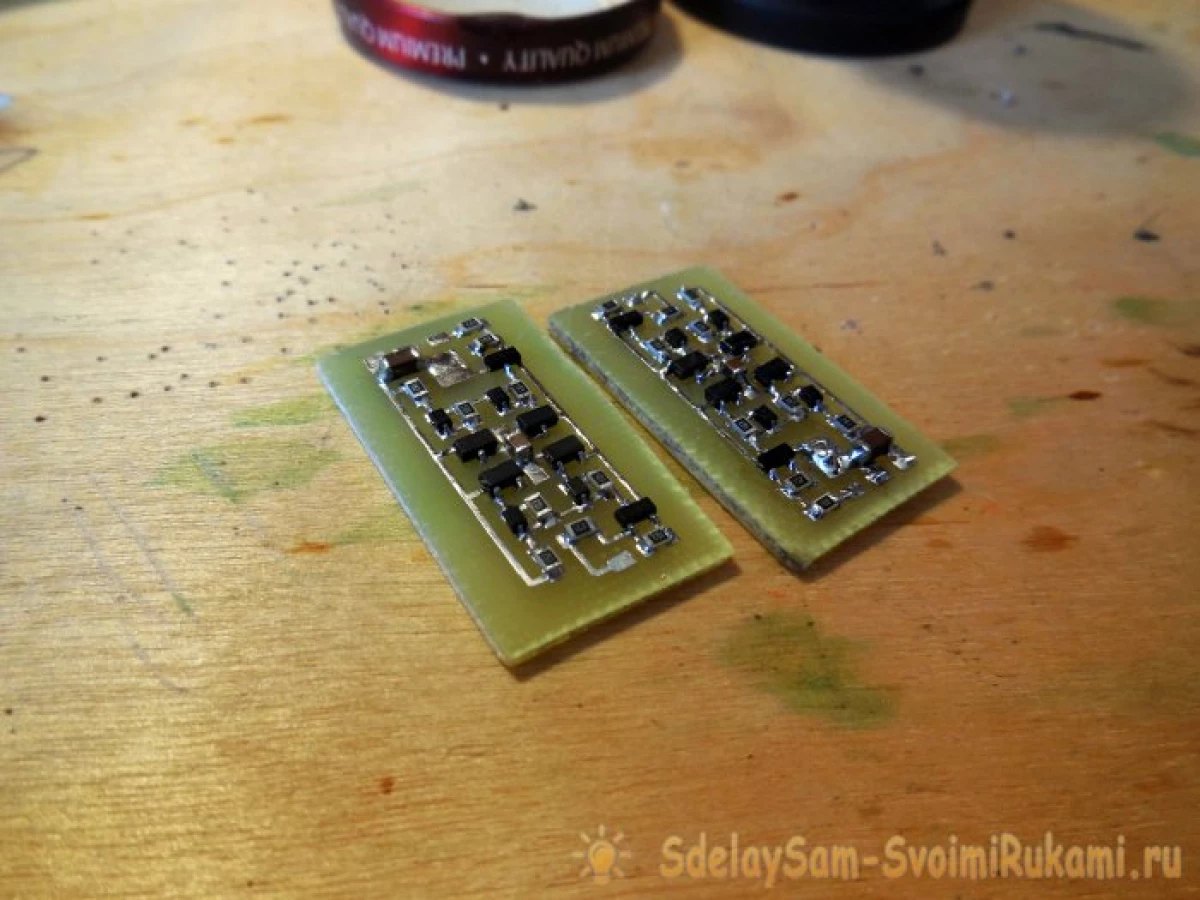
ईन्जिन यस योजनामा जडित छ, र यसले दुई इनपुटहरू समावेश गर्दछ - in1 र in2 समावेश गर्दछ, -5--5 भोल्टलाई एक दिशामा परिमार्जन गरिन्छ - मांसपुट गर्ने अर्कोमा घुमाइएको छ पक्ष यदि भोल्टेज कुनै पनि इनपुटको सेवा गरिएको छैन भने, वा दुबै इनपुटलाई तत्काल प्रदान गरिएको छ - मोटर घुमाउँदैन, यो कामको एक साधारण तर्क हो। रेखाचित्रमा 4 क्षेत्र ट्रान्जिस्टरहरू छन् जुन मोटर स्विच गर्दछ, त्यसैले तिनीहरू पर्याप्त ठूलो वर्तमानमा गणना गर्नुपर्दछ। ती मध्ये दुईवटा च्यानल हुन्, तपाईं AO3400, अन्य दुई p-च्यानलहरू, उपयुक्त Ao3401 प्रयोग गर्न सक्नुहुनेछ। रेखाचित्रमा पनि दुई बित्तार नेकपा ट्रान्सियरहरू छन्, BC847 उपयुक्त छ वा कुनै पनि अन्य समान छ। क्रममा चाजिसमा धेरै ठाउँ लिन नदिन, म यो योजनालाई एसएचडी कम्पोनेन्टहरूमा भेला गर्न सिफारिस गर्दछु। डायोडहरू कुनै पनि प्रकारको छन्, उदाहरणका लागि 1n41485W। यस योजनाको पावर इनपुटमा (12 V को रूपमा निर्दिष्ट गरिएको), रूपान्तरणको भोल्टेज आपूर्ति गरिएको छ। कृपया नोट गर्नुहोस् कि योजनालाई दुईवटा प्रतिलिपिहरू जम्मा गर्नुपर्नेछ - बायाँ र दाहिने मोटरको लागि, ती तदनुसार दोस्रो धर्म परिवर्तन गर्नेहरूबाट ब्यूँझाइनेछ। तल स .्कलन गरिएको सर्किट बोर्डहरूको फोटोहरू।

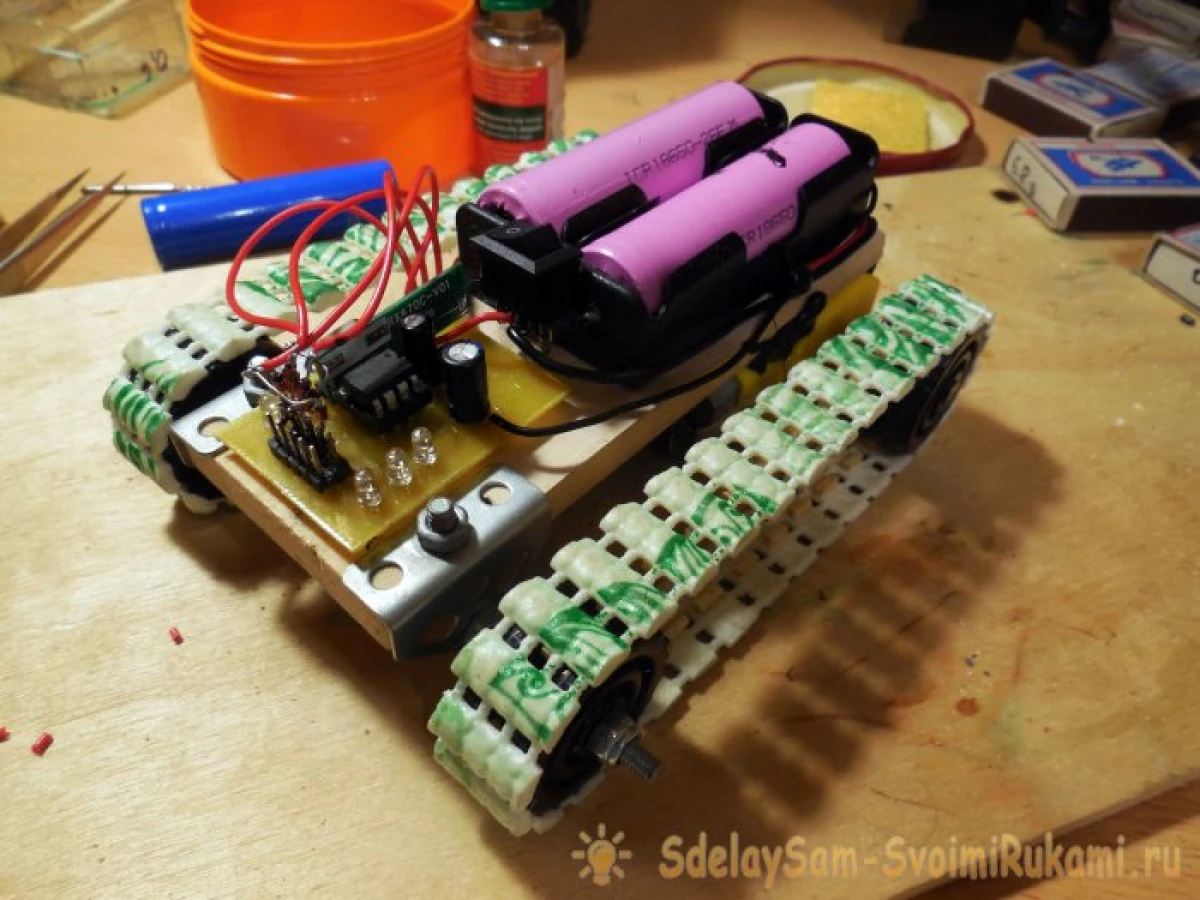
अब तपाईं सिधा निर्धारणमा अगाडि बढ्न सक्नुहुन्छ - र पहिले सबैको 1 186500 ब्याट्रीहरूको शीर्षमा जोड्ने जोडी स्थापना गर्न लायक छ, ब्याट्रीजहरू समानान्तर छन्।

डिपोडरको अगाडि ब्याट्रीहरू अघि डिस्डरडर्ड बोर्ड स्थापना गरिएको छ, तपाईं तुरून्त होल्डर सम्पर्कमा स्विच मार्फत यसलाई जोड्नुहोस्। सुविधाका लागि, यस बोर्डमा fordes सम्ममा स्थापित भएका छन् - रिमोट कुञ्जी थिच्दा सम्बन्धित अगुवाहरू प्रकाश हुनेछ।
तल्लो भागमा, चेसिस मुनि, रूपान्तरणकर्ताहरूको एक जोडी र प्रीप्पीको एक जोडी संलग्न हुन्छ। तुरून्त, सबै तारहरू द्वारा जडित छ - मालिकहरूको स्विच मार्फत रूपान्तरणहरू, रूपान्तरणको बोर्डहरू, र बोर्डका आउटपुटहरू, बारमा, मोटर भाउमा आउटपुटहरू। यो दिमागमा जन्माउनु पर्दछ कि रूपान्तरणहरूका मोटलले अधिक उच्च वर्तमानमा, वर्तमान उपभोग गर्न सक्दछ, वर्तमान उपभोग करिब 2 गुणा बढी हुन्छ र केहि पोइन्टहरू, त्यसैले यो आवश्यक छ आपूर्ति पावर पर्याप्त बाक्लो तारहरू आपूर्ति गर्नुहोस्।
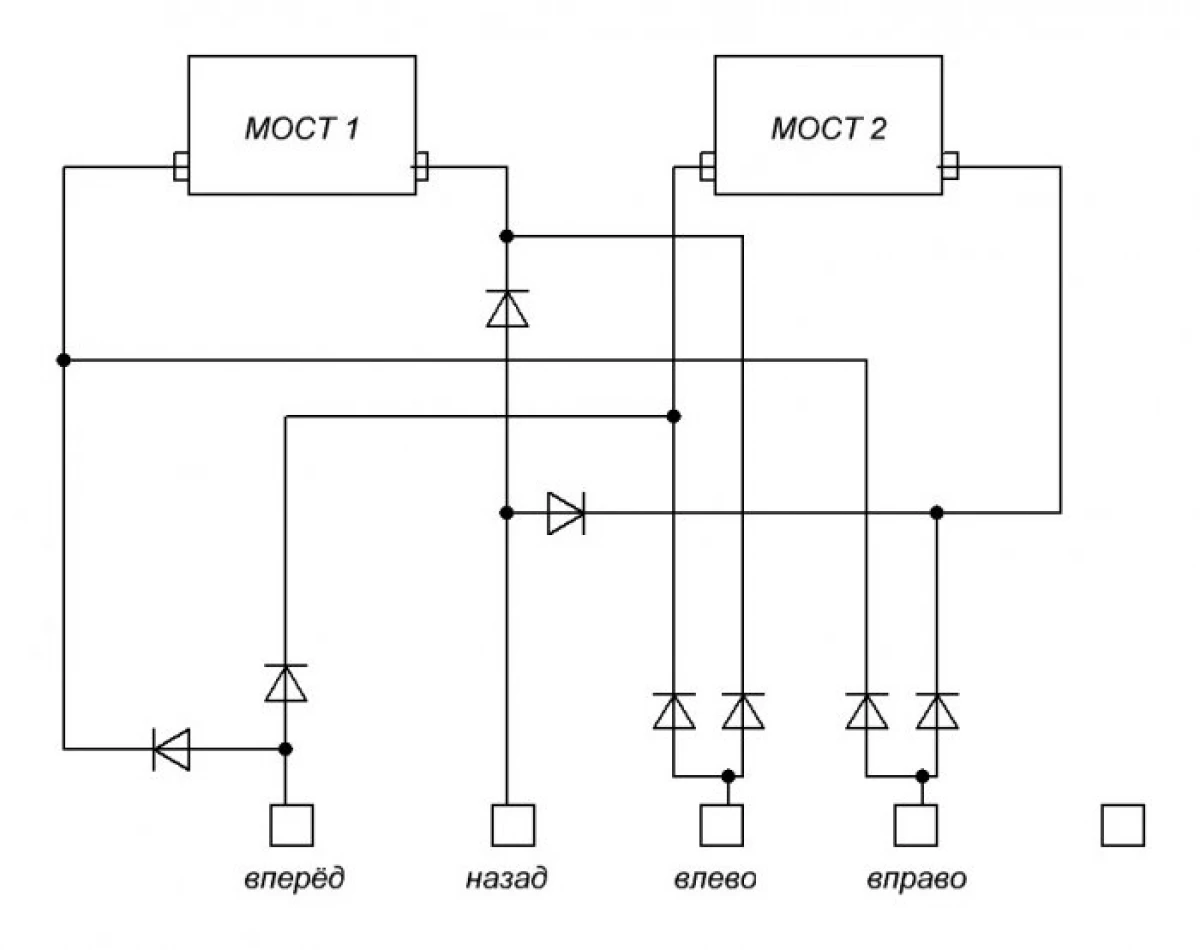
पछिल्ला, अन्तिम विधानसभा चरणमा रहन्छ - तपाईंले डीलहरू (in आउटपुटहरू) ब्रिजहरूको इनपुटहरू (on आउटपुटहरू) जडान गर्न आवश्यक छ, जुन जब तपाईं उपकरण थिच्नुहुन्छ भने, जब तपाईं उपकरण थिच्नुहुन्छ, मेसिन भित्र प्रतिक्रिया हुन्छ। चाहिएको तरिका। अर्थात्:
- "अगाडि" थिच्नुहोस् - दुबै ईन्जिनहरू एक दिशामा घुमाउँदछन्।
- "पछाडि" थिच्नुहोस् - दुबै ईन्जिनहरू विपरित दिशामा घुमाउँदछन्।
- "दायाँ" थिच्नुहोस् - बायाँ मोटरलाई अगाडि बढ्छ, दायाँ पछाडि, मेशिनमा घडीको दिशामा हुन्छ।
- "बायाँ" थिच्नुहोस् - दायाँ मोटर पछाडि घुमाउँदा, बाँया फर्किन्छ, मेशिनले काउन्टरक्लवाइज गर्दछ।
- "अगाडि" र "दायाँ" को दबाव एक साथ - बायाँ मोटर अगाडि बढ्छ, ठीक चीज ठाउँमा खडा छ, यसैले, एक चिल्लो पालो हुन्छ।
- एकै साथ दबाएर "अगाडि" र "बायाँ" - त्यस्तै, अर्को तरीकाले।
यस तर्क लागू गर्न, तपाईंले तल देखाइएको रूपमा पुष्ट इनपुटहरूको आउटपुटहरू जडान गर्नु आवश्यक छ तल देखाइएको जस्तो देखाइएको छ।
डिपोडरको तल तल देखाइएको छ, जबकि तिनीहरू मध्ये एक निःशुल्क छ, यो अन्य कार्यहरूको लागि प्रयोग गर्न सकिन्छ। Dodss यहाँ तपाईं उही 1n414848 प्रयोग गर्न सक्नुहुन्छ, तिनीहरूलाई डिडको आउटपुटमा माउन्टिंग गरेर जमालियो।
परिक्षण
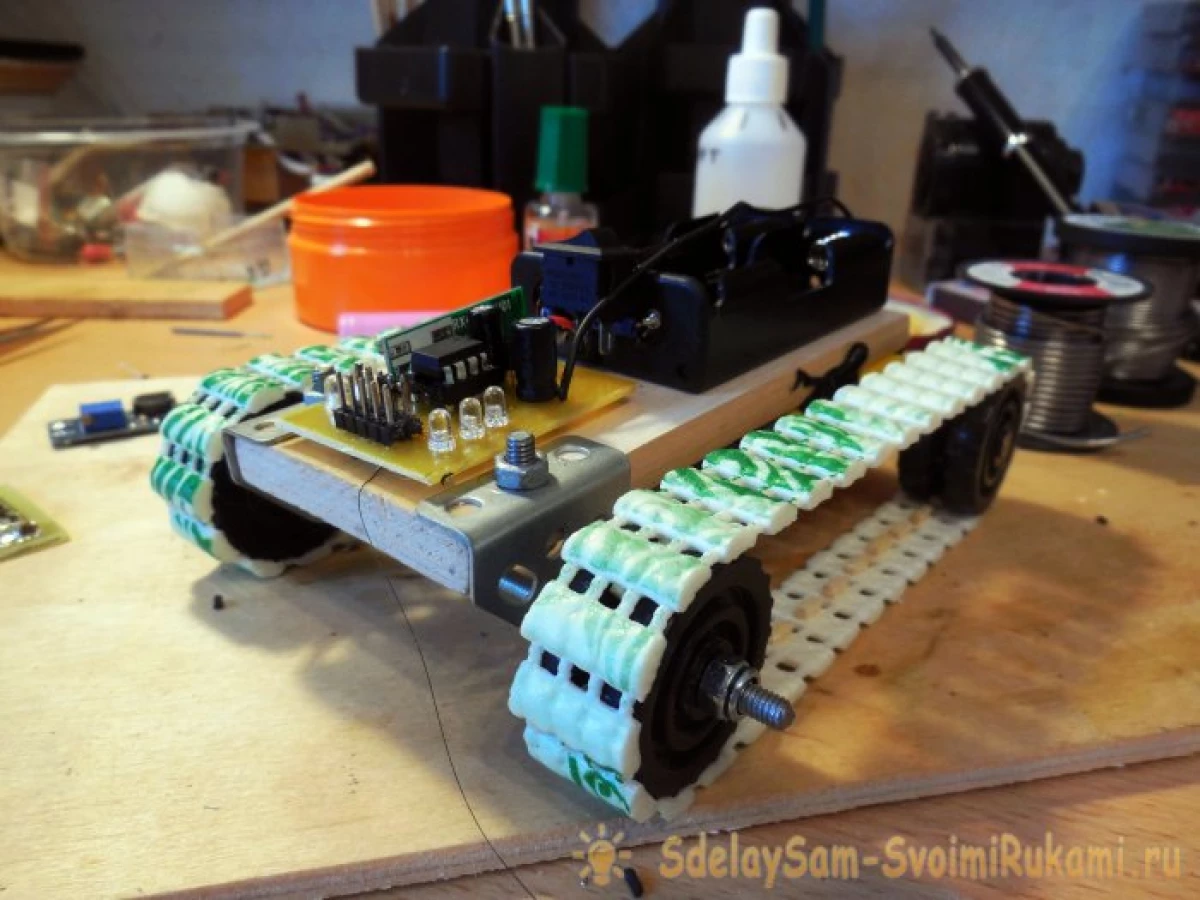
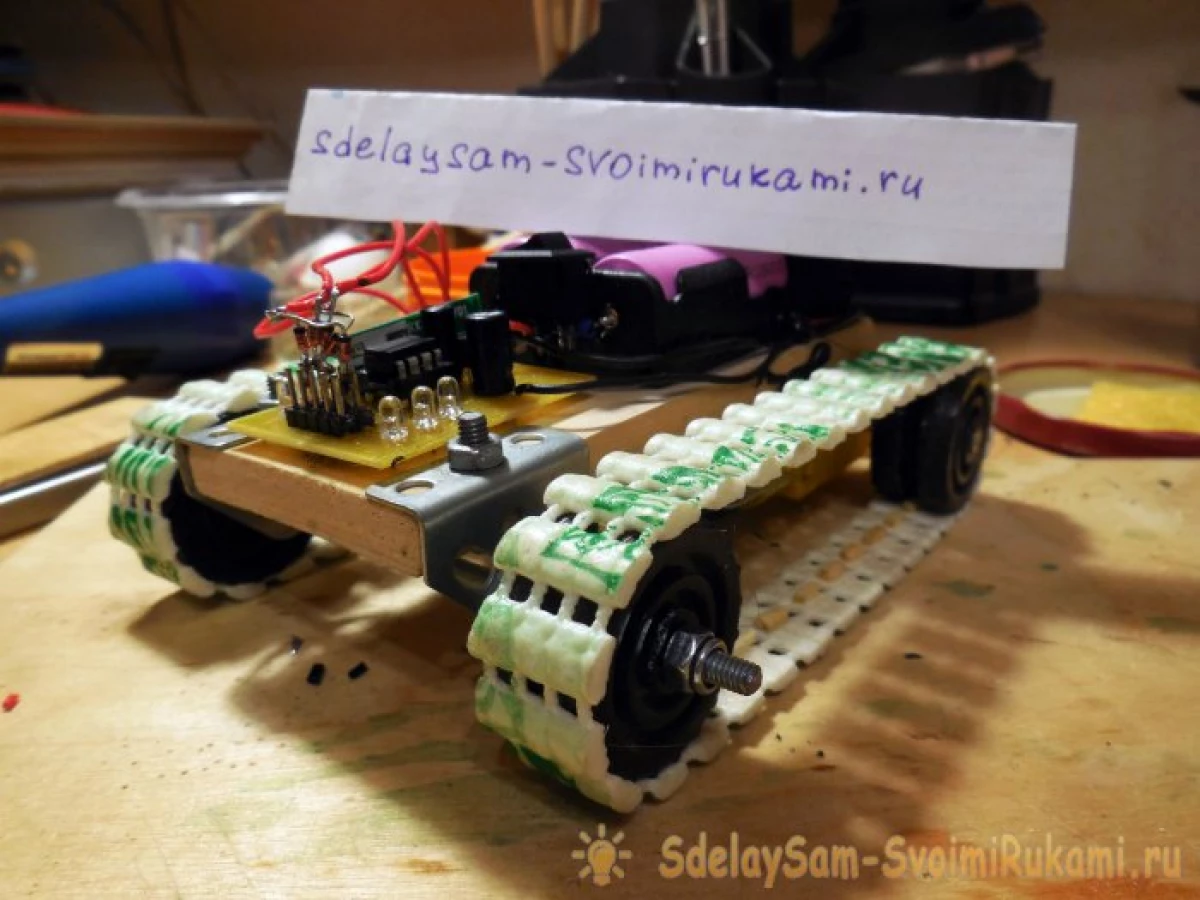
यो मेसिनमा सम्पन्न भयो, तपाईं ब्याट्री घुसाउन सक्नुहुन्छ र अपरेसन जाँच गर्न सक्नुहुन्छ। एकै समयमा, कन्सोलका टोलीहरूको अभाव जाँच गर्न अनावश्यक हुँदैन - कन्सोलको टोलीको अभावमा यो सानो हुनुपर्दछ, 'MAM को बारेमा। कन्सोलको दूरीमा प्रयोग गरिएको मोड्युलहरू र ट्रान्समिटरको प्रयोगमा निर्भर गर्दछ - प्राय: शहरी सर्तमा 20--300 मिटरले मेसिन नियन्त्रण गर्न पर्याप्त हुन्छ। यसले एन्टेनासको दायरा बढाउन मद्दत गर्दछ, तपाईं 1m सेन्टीमिटरको लम्बाइको साथ कपर तारको टुक्राहरू लिन सक्नुहुनेछ (43 433 MHZ को फ्रिसीको लागि) र "एन्ट्री" सम्पर्कहरू
तसर्थ, यो बच्चा र वयस्कहरूको लागि एकदम व्यस्त मेटियो - pvc-रग क्याटरपिलहरूले कुनै पनि सतहहरूको साथ उत्कृष्ट क्लच प्रदान गर्दछ, त्यसैले मेशिनले सजिलै अवरोधहरू पार गर्दछ। क्याटरपिललको फाइदा पनि नियन्त्रणको सरलतालाई श्रेय दिन सकिन्छ - थप स्टीयरिंग संयन्त्रहरू स्थापना गर्न आवश्यक छैन, सबै नियन्त्रणहरू ट्र्याकहरूको दिशाको दिशामा मात्र हुन्छ। वर्णन गरिएको डिजाइन डिजाइन चेस को अभाव एक सानो "सडक खाली" भन्न सकिन्छ - मोटर्स तल छ र त्यहाँ ड्राइभिंगको आनन्दमा हस्तक्षेप गर्दैन, र यदि चाहिएको छ भने, यो अभाव पछाडिको पा els ्ग्राहरूको लागि अतिरिक्त अक्ष थप्न र माथिबाट मोटर्सको लागि थप अक्ष थप्न सकिन्छ। सफल सम्मेलन!