Bu makaleyi okumaya başlamadan önce, Bellman - Ford Algoritması'na göre yolun hesaplanması hakkındaki materyalle tanışmanızı tavsiye ederiz.
Difüzyon güncelleme algoritması (yaygın güncelleme algoritması), burada başlangıçta dağıtılmış bir ağda uygulanan iki algoritmanın biridir. Bununla birlikte, algoritmanın son otomatlarında bulunan başarılar ve topoloji hakkındaki bilgileri de ortadan kaldırır. Burada tartışılan diğer algoritmalar, Protokolün uygulanmasının takdirine bağlı olarak bilgilerin çıkarılmasını bırakır ve algoritmanın çalışmalarının bu yönünü algoritmanın kendisi içindeki bu yönünü göz önünde bulundurmayın.
1993'e kadar Bellman-Ford ve Dijkstra, çeşitli yönlendirme protokollerinde dağıtılmış algoritmalar olarak uygulandı. Bu erken uygulama ve dağıtımların bir sonucu olarak kazanılan deneyim, yolun ve çiftin görünümüne yol açan ağ anahtarlama ağlarında yönlendirme sorunu üzerine araştırma ve yansımanın "ikinci dalgasına" yol açtı.
Dual dağıtılmış bir algoritma olarak tasarlandığından, ağdaki çalışmalarını tanımlamak en iyisidir. Bu amaçla, Şekil 8 ve 9'u kullanılır. İkili açıklamak için, bu örnek üç varış yerindeki bir akışta izlenecektir ve ardından değişiklikler aynı hedef öğelerin kullanılabilirlik durumunda işlenir. İlk örnekte, alternatif bir yol olduğunda durum dikkate alınacaktır, ancak alt komşu yoktur, ikincisi alternatif bir yol ve alt komşu olduğunda durumu göz önünde bulunduracaktır.
Şekil 8'de, D-bakış açısından D çalışma:
- A D'nin iki yolunu öğrenir:
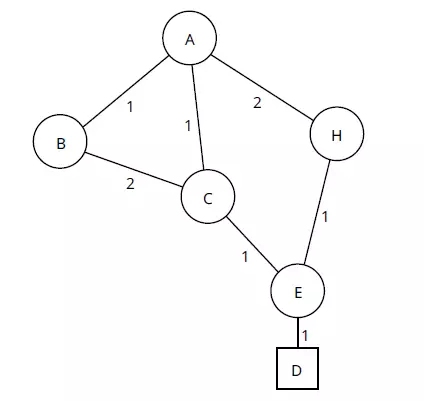
- A, B yolunu tanımayacaktır, çünkü B, A'nın halefi olarak kullanır:
- A Mevcut yolları karşılaştırır ve döngüler olmadan en kısa yolu seçer:
- A, akış aşağı komşuların herhangi biri olup olmadığını belirlemek için kalan yolları kontrol eder:
A bunu bilir çünkü c, D rotasını, yerel metriğiyle 3'e eşit olduğunu bildirir.
A Topoloji tablosunda yerel bir metrik c tutar.
Sonuç olarak, A, C'deki yerel değeri ve A'daki yerel değerleri bilir.
- 3 (C'ye maliyet) = 3 (A'da maliyet), bu nedenle bu rota döngü olabilir, bu nedenle C fizibilite durumunu karşılamaz. C aşağı komşular olarak etiketlenmez.
Dual'daki aşağı akış komşuları olası halefler denir. [A, H] kanalın çalışmadığını varsayalım. İkili periyodik güncellemelere dayanmaz, bu nedenle A sadece güvenilir bilgi içeren başka bir güncelleme bekleyemez. Aksine, A aktif olarak alternatif bir yolu takip etmelidir. Böylece, bu bir alternatif yolun yaygın bir algılama işlemidir. [A, H] kanal çalışmazsa, sadece D'yi göz önünde bulundurun:
- A, yerel masanızı olası halefler için (aşağı akış komşuları) kontrol eder.
- Muhtemel halef yoktur, bu nedenle A döngüler olmadan d (varsa) alternatif bir yol bulmalıdır.
- A, D'lere döngüler olmadan herhangi bir alternatif yol olup olmadığını belirlemek için her komşuya bir istek gönderir.
- C'de:
- B'de:
- A bu cevapları alır:
Şekil 9'da, hedef (d) öğesi H ile E ile taşındı. Bu, ikinci örnekte kullanılacaktır.
Bu örnekte, olası bir halef var (aşağı akış komşu).
Bakış açısına göre D çalışma A:
- A D'nin iki yolunu öğrenir:
- A B üzerinden herhangi bir şekilde tanımayacaktır:
- A Mevcut yolları karşılaştırır ve döngüler olmadan en kısa yolu seçer:
- A, akış aşağı komşuların herhangi biri olup olmadığını belirlemek için kalan yolları kontrol eder:
[A, C] kanalı çalışmazsa, sadece bir:
- A, olası bir halef için yerel topoloji tablosunu kontrol eder.
- Olası halefi H ile var.
- A, yerel tablosunu H'deki en iyi şekilde değiştirir.
- A Başarı maliyetinin 3 ile 4 arasında değiştiğini belirten komşularına bir güncelleme gönderir.
Gördüğünüz gibi, olası bir halefin olduğunda işleme, onsuz daha hızlı ve daha kolay. Yönlendirme protokolünün çift (özellikle EGRP) kullanıldığı ağlarda, ana tasarım hedeflerinden biri, olası bir halefin yokluğunda oluşturulan herhangi bir isteğin hacmini sınırlayacaktır. İstek alanı, çift algoritmanın hızlı bir şekilde tamamlandığı ana belirleyici faktördür ve bu nedenle, ağın ne kadar hızlı bir şekilde yaklaşır.
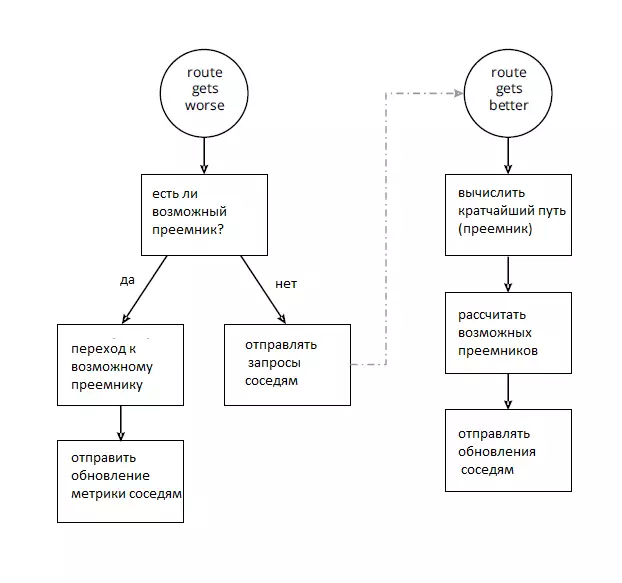
Şekil 10, temel bitmiş çift makineyi göstermektedir.
Rotaya dahil olan şeyler daha da kötüleşiyor (rotanın bozulması) olabilir:
- Bağlı kanalın veya komşunun başarısızlığı
- Daha yüksek metriğe sahip bir rota için bir güncelleme elde etmek
- Mevcut haleften bir sorgu almak
- Komşudan yeni bir rota almak
- Yeni bir komşu, bulabileceği yolların yanı sıra
- Rota kötüleştiğinde komşulara gönderilen tüm istekleri almak