
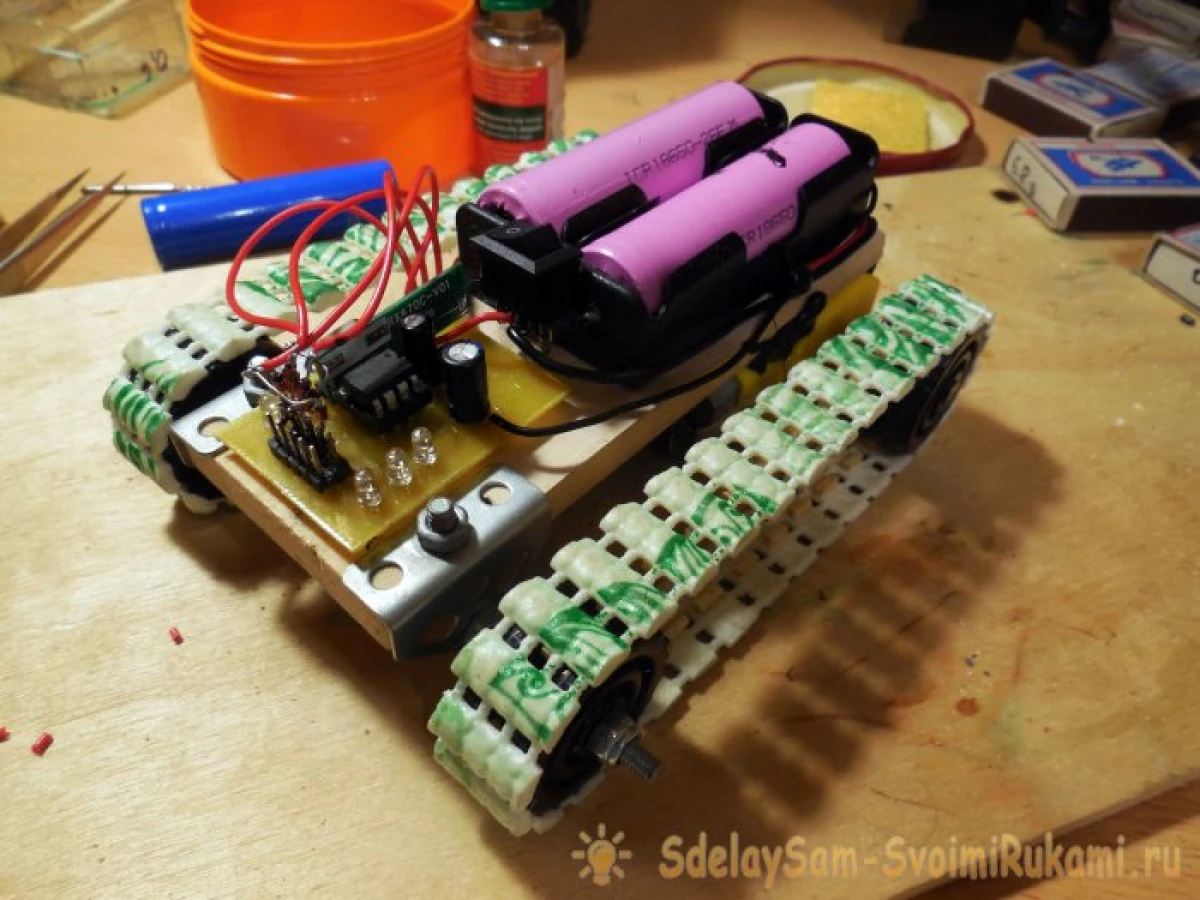
꽤 기본 디자인으로 캐터필라에서 타자기를 만들어서 몇 명의 저녁을 위해 문자 그대로 가능 할 수있는 조립을 조립하는 것을 고려하십시오. 전체 설계는 추적 된 섀시와 원격 제어에서 기계의 원격 제어를 제공 할 두 부분으로 나눌 수 있습니다.
섀시 제조
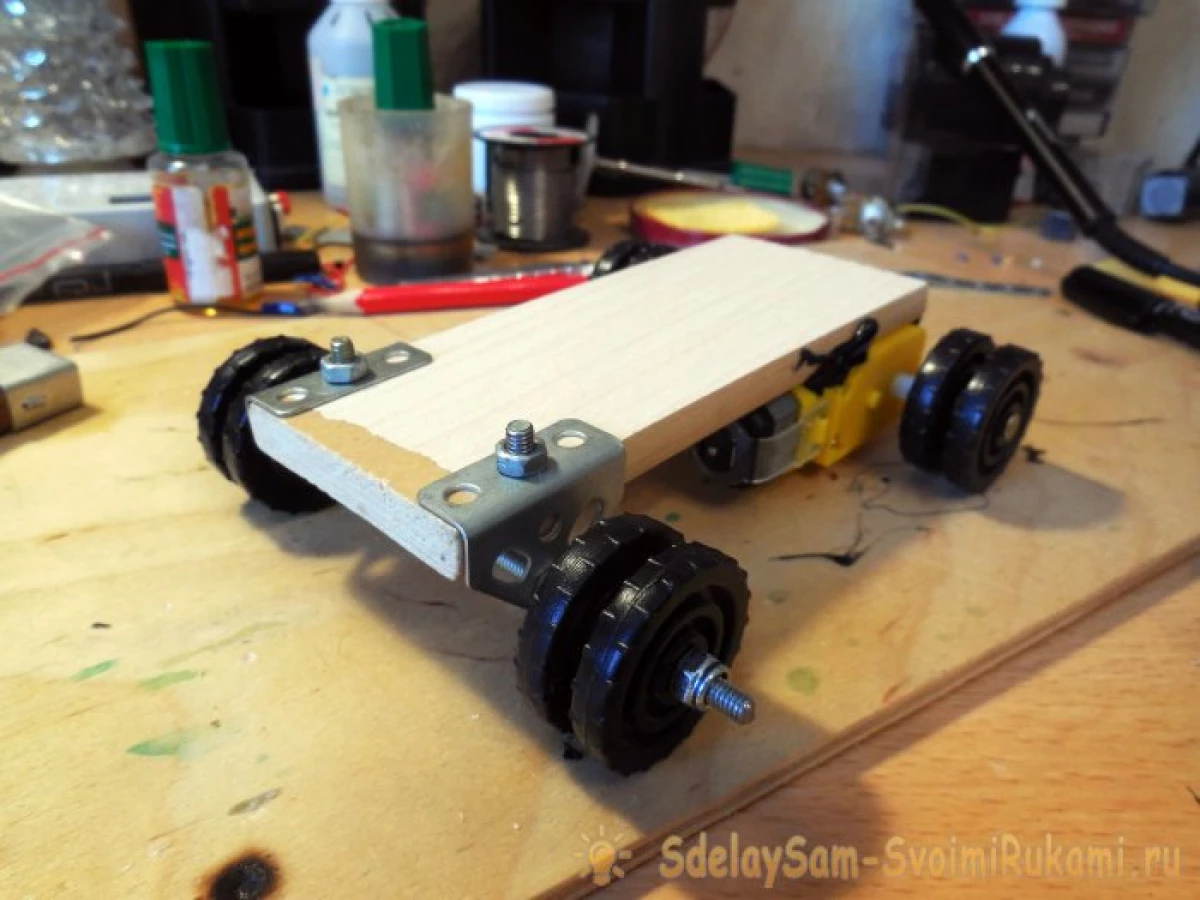
그것은 너무 많은 자료가 아닙니다. Caterpillar는 한 쌍의 기어 박스에 의해 구동 될 것입니다. 전체 디자인의 기초는 두꺼운 합판의 작은 조각이 될 것입니다. 캐터필라가 회전 할 여러 가지 플라스틱 휠이 필요합니다. 기계의 경우 거의 모든 적합한 기어 박스, 라디오 구성 요소의 많은 상점에서 찾을 수 있거나 Ali에서 구입할 수있는 이상적인 "옐로우"를 사용할 수 있습니다. 기어 박스는 기어비 1:48을 제공합니다.이 경우이 경우는 최적의 가치..
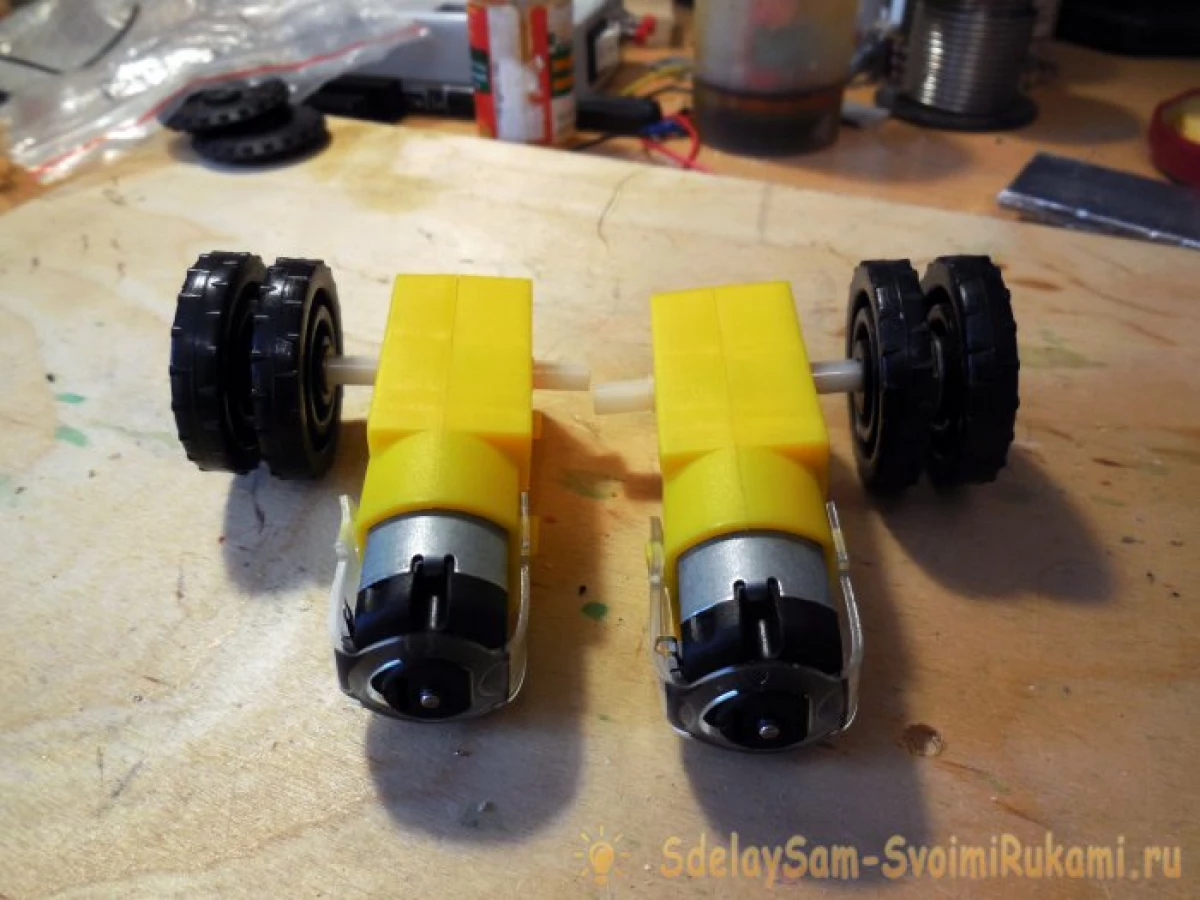
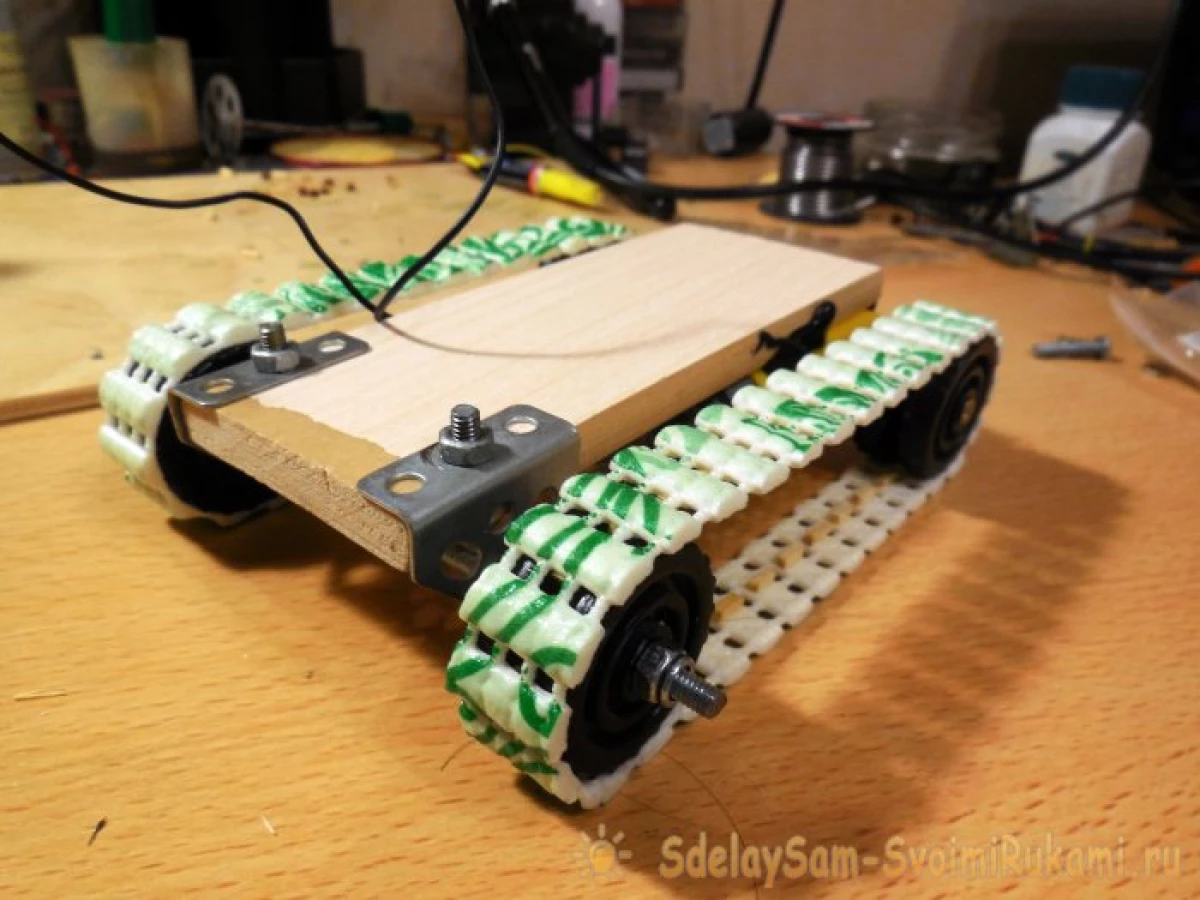
각 기어 박스는 2 개의 샤프트에 액세스 할 수 있으며, 하나의 샤프트 만 캐터필라 섀시에 대해 활성화되며, 하나의 샤프트만이 관련 될 것이며, 두 번째는 전혀 제거되거나 다른 프로젝트 에도이 모터가 여전히 필요하다면 두 번째로 제거 할 수 있습니다. 샤프트의 휠을 고정해야합니다. 빠른 속도로 나사 자체를 빠르게 만드는 데 필요합니다 (내부는 중공이어야합니다). 따라서 바퀴가 잘 수 있습니다. 추가 고정을 위해 나사를 풀지 않도록하려면 접착제와의 연결을 풍부하게 윤활시킬 수 있습니다. 휠은 더블입니다 - 각 바퀴 각각에 약 3-4mm 사이의 간격이 있으며, 애벌레가 고정됩니다.

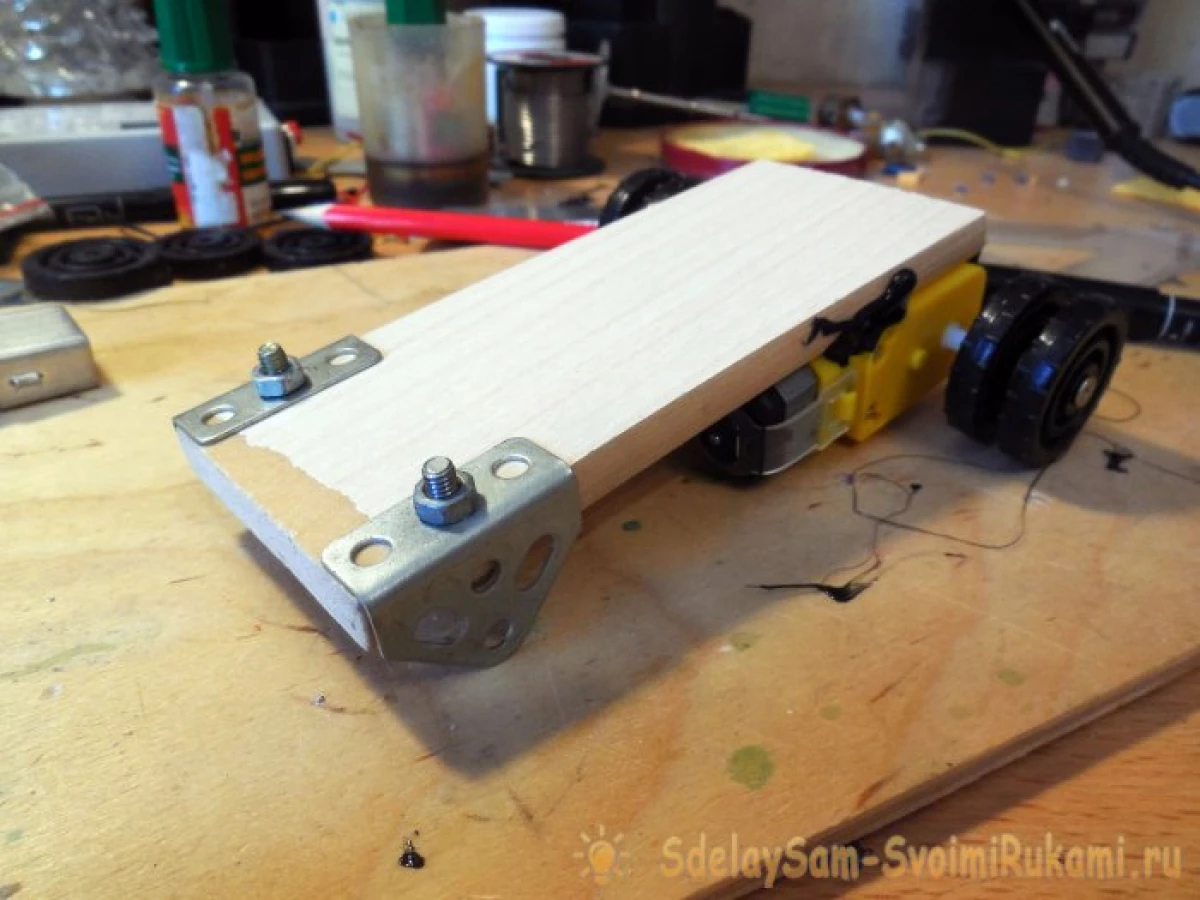
모터는 내구성 합판 조각에 고정되어 있으며, 그 크기는 기계의 원하는 크기에 따라 임의로 선택할 수 있습니다. 이러한 기어 모터를 고정하기위한 편리한 장소는 제공되지 않으므로 Thermoclause를 사용하여 기록했습니다. 좋은 접착 봉은 경험을 보여 주므로 우수한 품질의 화합물을 제공합니다.

다음으로, 모터의 반대편에서는 전방 휠의 축을위한 모서리를 고정시킬 필요가 있습니다. 이렇게하려면 어린이 철제 디자이너의 세부 사항을 사용하는 것이 좋습니다. 구멍이있는 기성 모서리를 찾을 수 있습니다. 합판에서 구멍을 드릴링 할 때 미래에는 유충 장력을 조정할 수 있으므로 약 1-1.5cm 길이의 구멍의 행을 드릴링해야합니다. 그런 다음 하나의 직사각형 슬롯으로 결합하십시오. 따라서 전체 프론트 액슬은 볼트를 원하는 위치에서 고정하여 뒤로 이동합니다.
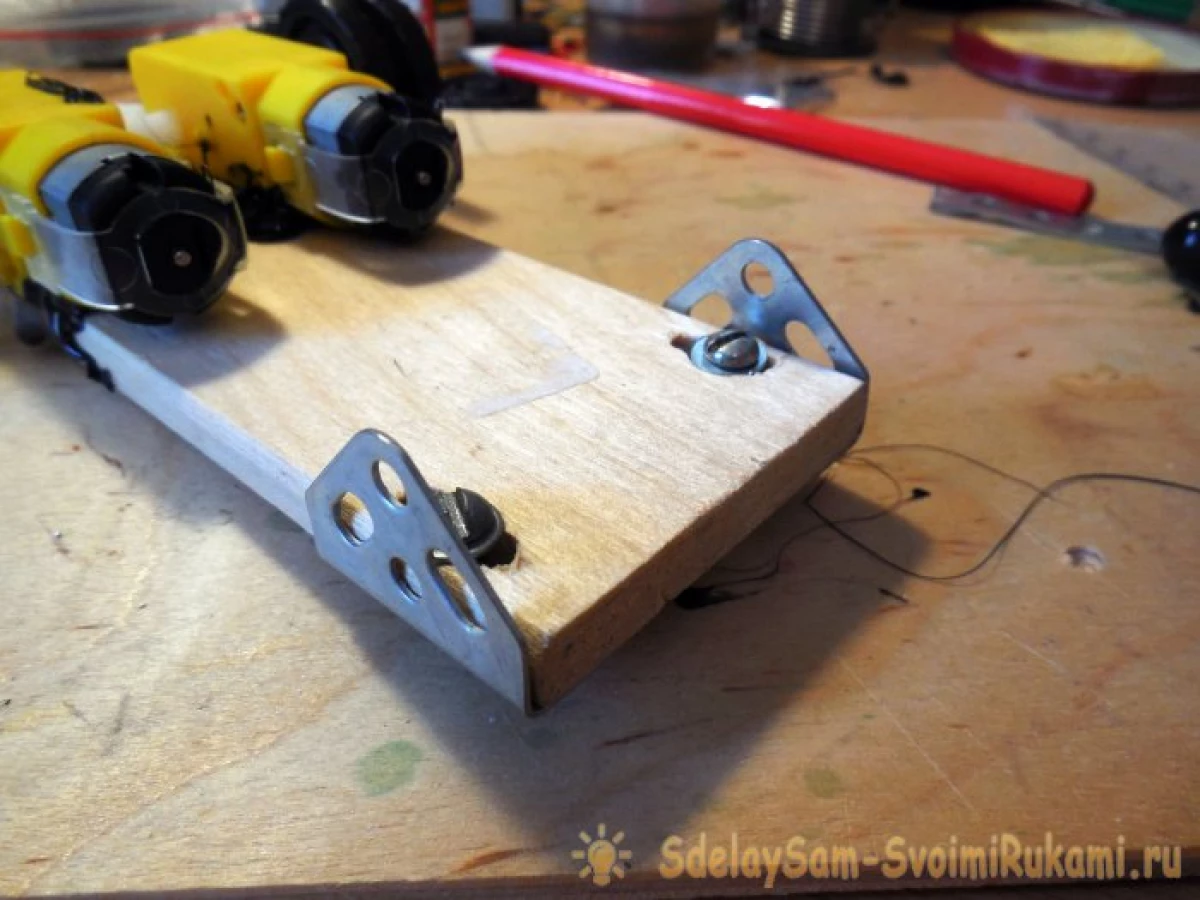
모서리의 구멍의 구멍은 M4를 사용하는 것이 편리합니다. 충분한 경도를 제공하며 철 디자이너의 일부 부분에 구멍에 적합합니다. 발 뒤꿈치는 모서리에 고정하기가 어려워 져야하며,이 견과류에 대한 고정으로 너트를 사용하는 것이 편리합니다. 기계가 타기 시작할 때 스스로 회전하지 않습니다. 측면에서 동일한 두 바퀴가 똑같은 간격으로 뒤에 설치됩니다. 바퀴는 축에서 자유롭게 회전해야하므로 고정시 같은 견과류에 의해 제공 할 수 있습니다. 왼쪽과 오른쪽 바퀴는 서로 독립적으로 회전해야합니다. 내가 같은 철 디자이너를 데려 갔지만 여러 개의 레이어와 접착제로 접어지면 플라스틱 또는 조밀 한 골판지와 비슷하게자를 수 있습니다.

애벌레 제조
그러나 좋은 클러치가있는 우수한 애벌레가 PVC 목욕 깔개로부터 얻은 우수한 유충은 거의 모든 가정 용품에서 찾을 수 있습니다. 이러한 양탄자는 병렬 스레드가 상호 연결된 다양한 유연한 "스트립"으로 구성되어 있습니다. 캐터필라를 만드는 데 필요한 것. 리본은 1.5-2cm의 폭을 갖는 리본을 차단하고, 사용 된 휠의 폭과 같아야합니다.

그런 다음 섀시에 부착 된 바퀴에 테이프를 부착하고 필요한 길이로 잘라내어 리본의 끝은 슈퍼 클램으로 붙어 있습니다. 접착제가 건조한 후에는 섀시에서 캐터필라를 시도하고 모터를 켜고 모터를 켜십시오. 캐터필라가 회전하지만 휠에서 빠르게 떨어질 것입니다.
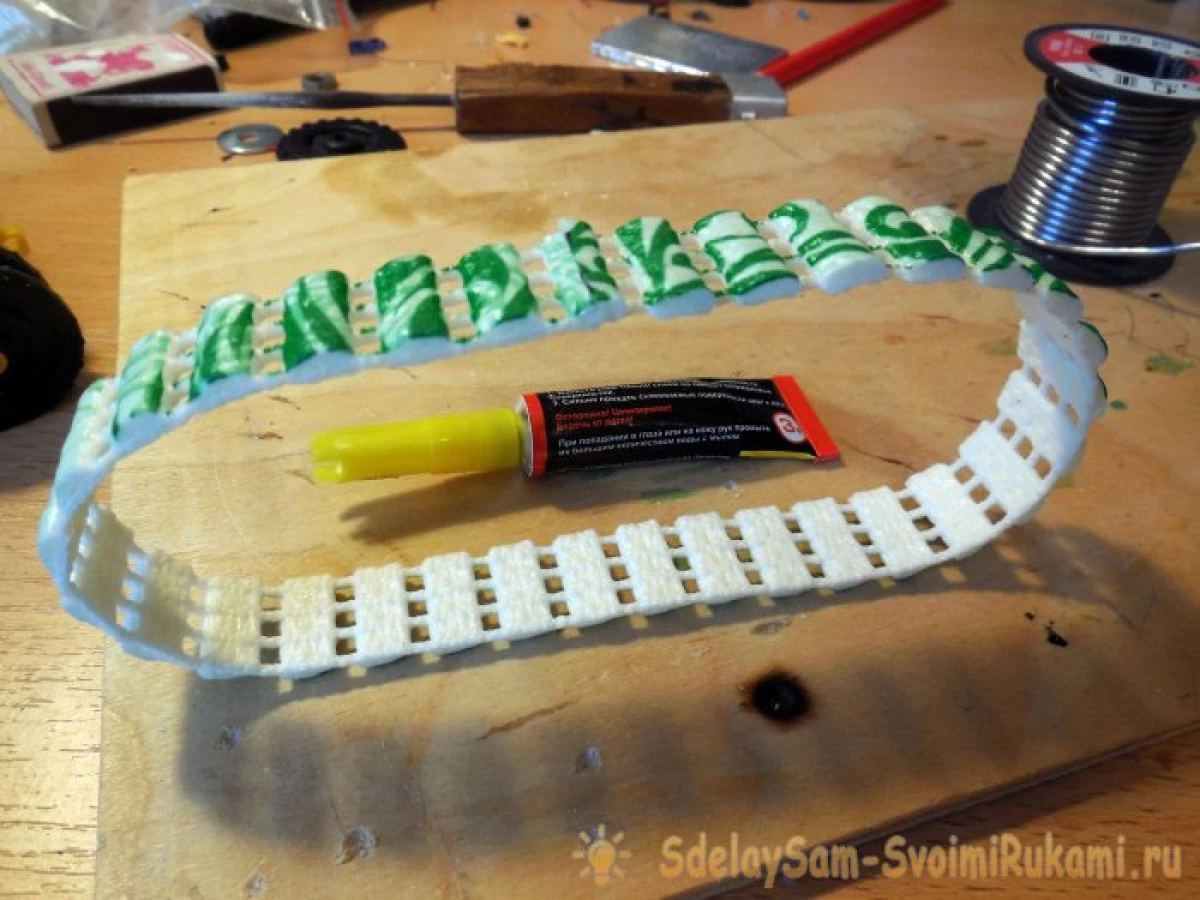
애벌레가 바퀴에서 떨어지지 않도록하려면 미래의 기계가 장애물을 움직일 때조차도 Caterpillar의 중심에서 볼록한 멈춰야합니다. 회전 할 때는 휠 사이의 격차에 빠지지 않고 애벌레를 도망 가지 않고 떨어졌습니다. 여러 가지면에서 그러한 멈춤을 할 수 있습니다. 경험이 보여주는이 방법은 근로자가되고 Caterpillar의 충분한 긴장감이 전혀 적합하지 않은 것으로 나타났습니다. 일치는 아래의 사진과 같이 5-6mm 길이의 길이의 세그먼트로 자르고 동일한 수퍼 전달터가 모두 사용됩니다 - PVC 매트 재료와의 연결이 양호한 강도를 보장합니다.

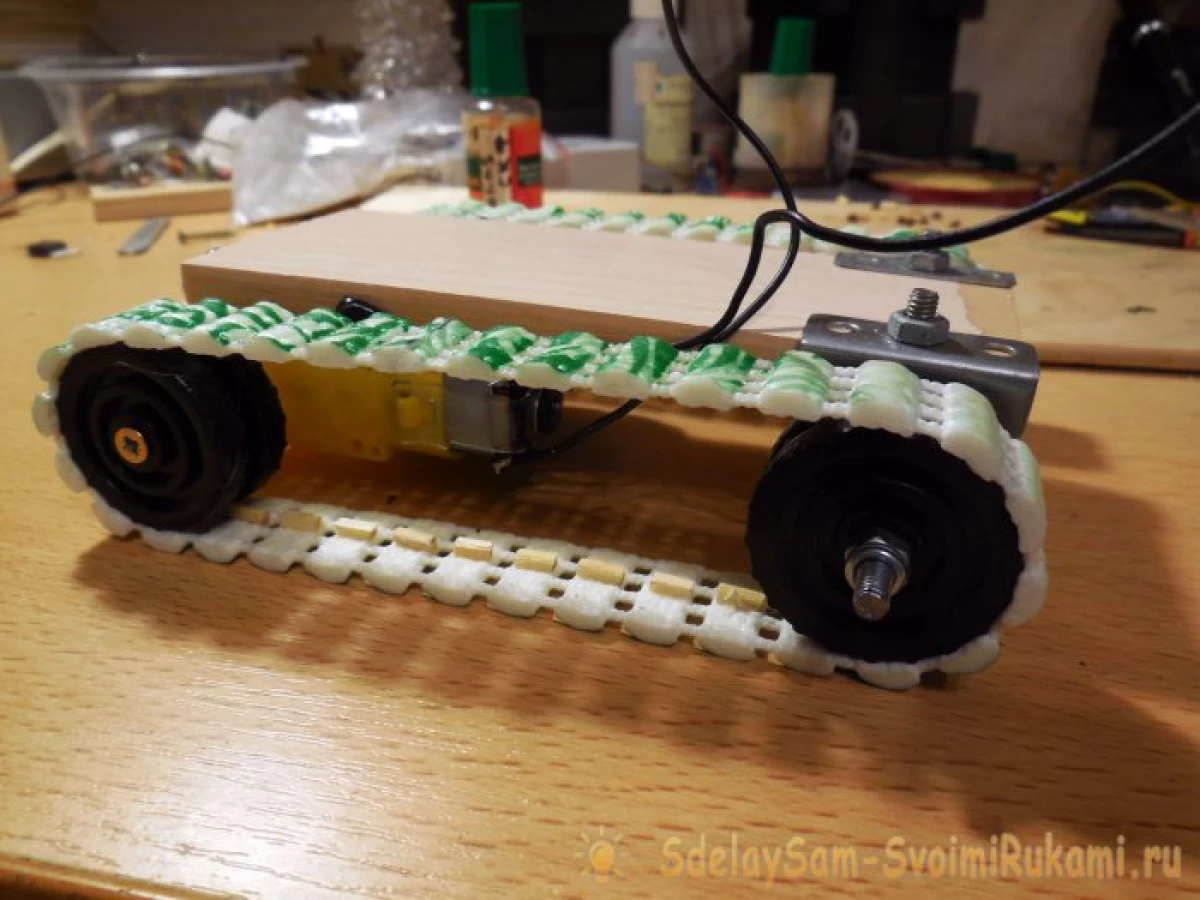
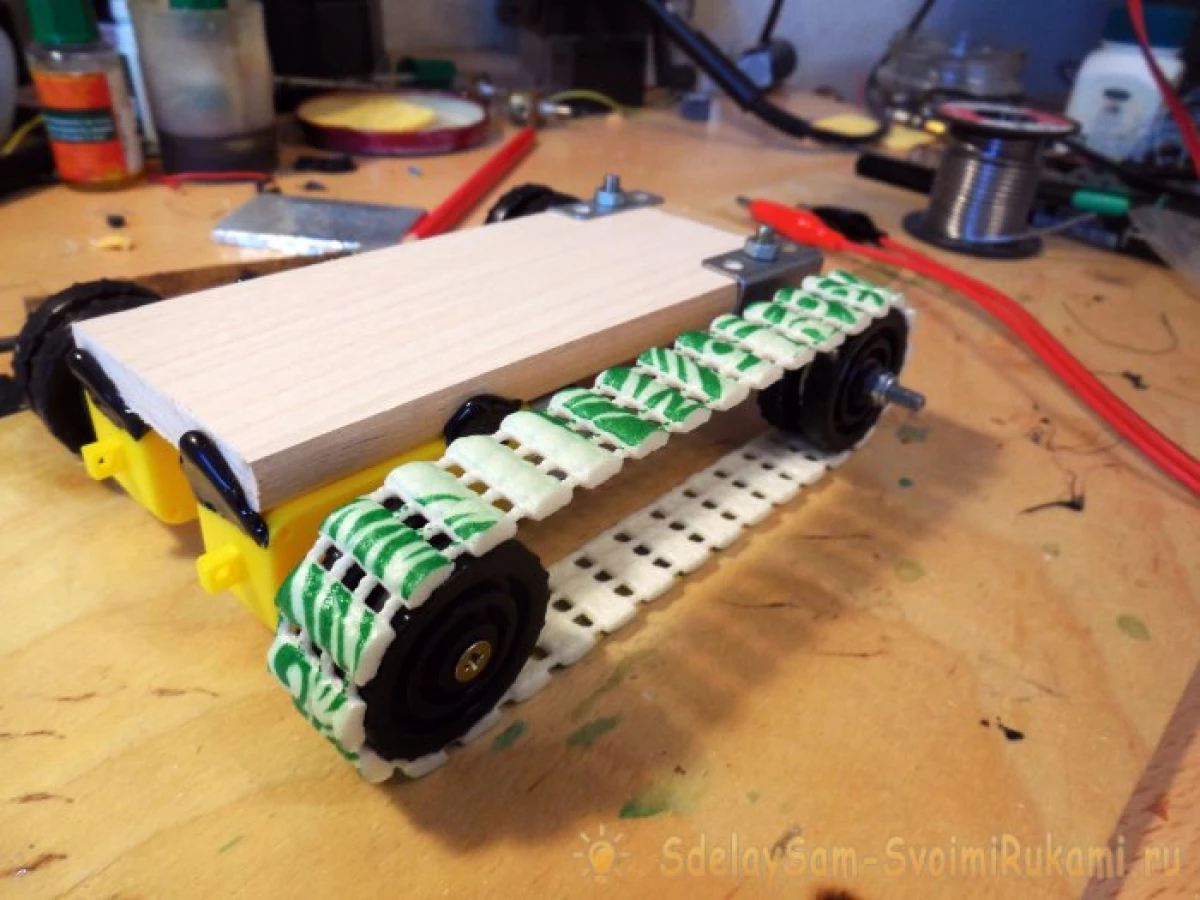
두 번째 캐터필라로 모든 동일한 조치를 취해야합니다. 애벌레를 찌르는 후에는 준비를 읽을 수 있습니다. 이제 섀시를 희망하며 미래의 컴퓨터가 어떻게 전달되는지를 이미 확인하여 두 모터에 직접 배터리 전압을 공급할 수 있습니다. 필요한 경우 인장력을 조정해야합니다. 너무 약한 애벌레가 꺼지거나 보조금으로 켜지거나 너무 많이 늘어납니다. 모터에 추가로드가 있습니다.
전기 부품
전기 부에서는 여러 개의 보드가 필요할 것입니다 : 리모컨으로부터 명령을 전송하기위한 수신기 및 송신기 카드, 컨버터가 모터의 전원을 늘리기 위해 컨버터가뿐만 아니라 각 모터의 회전 가능성을위한 "브릿지"보드 양방향으로. 일반적인 구성표는 송신기 보드가 기계 섀시의 수신기 보드 인 콘솔에 설치됩니다. 증가 컨버터는 전압 (3.7 - 4.2 Volts)에서 모터가 이미 먹을 수있는 7-8 볼트로 전압을 변환합니다. 모터가 충분한 속도를 발전시키고 배터리에서 직접 변환하면 트랜스 듀서를 설치할 수 없습니다. 운전 모터 회전은 브리지 회로가 될 것입니다 - 전압 또는 하나의 극성을 출력 할 수있는 필드 트랜지스터가있는 특수 계획, 또는 다른 입력 (1 또는 1 또는 2)은 수신기 보드로부터 제어 신호를 수신 할 수 있습니다. 처음에는 송신기와 수신기의 방식을 고려하여 각각 아래에 표시됩니다.
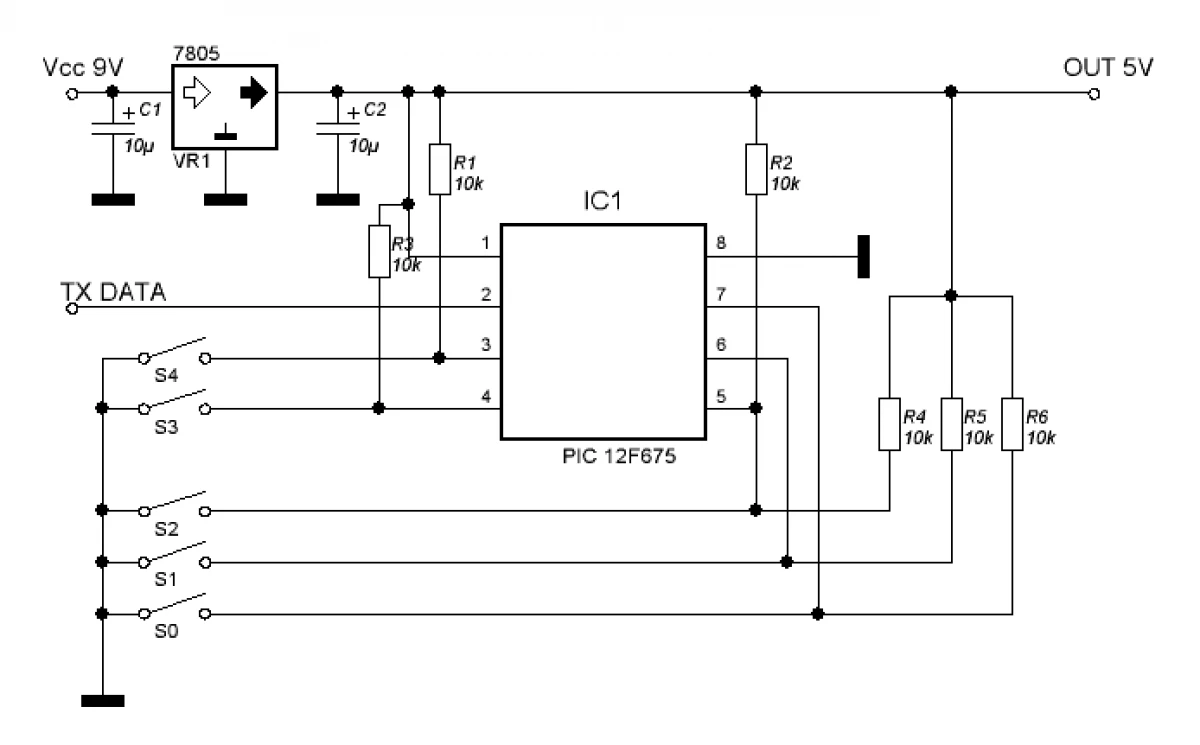
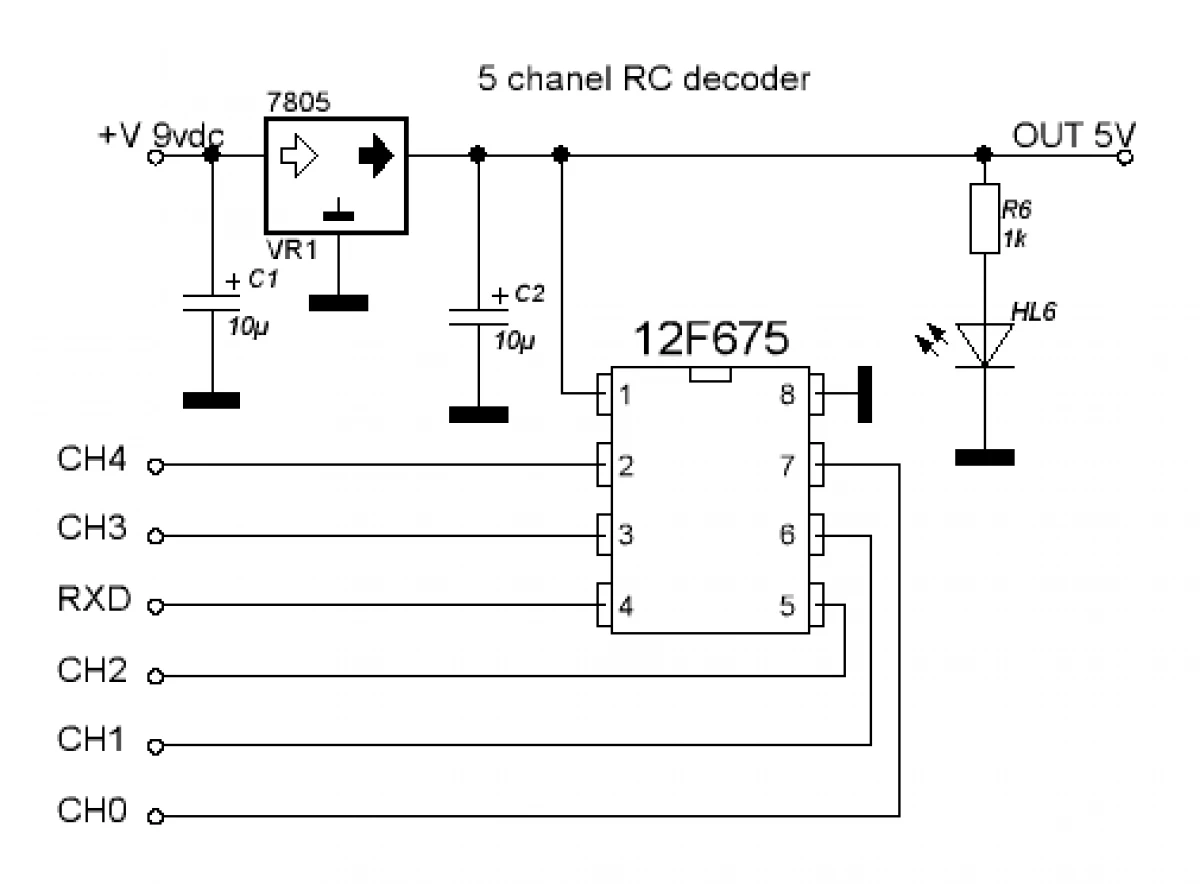
정확하며, 이러한 회로는 인코더 및 디코더라고하며, 수신기 및 송신기 및 송신기는 433 MHz의 주파수 당 기성품 RX-TX 모듈이며, 이는 ALI 또는 많은 무선 구성 요소의 많은 상점에서 쉽게 구입할 수 있습니다 -
각 모듈에는 전송 또는 데이터 세트의 데이터 접점뿐만 아니라 연결 - 플러스 전원, 빼기 및 데이터 세트에 대한 세 개의 접점이 있습니다. 위의 간단한 계획은 데이터 전송 프로토콜을 제공하여 5 버튼을 누르면 처리 할 수 있습니다. 타자기를 제어하려면 4 개의 채널 (앞으로, 뒤로, 오른쪽, 왼쪽) 만 필요하므로 5 번째 채널은 무료로 유지되고 예를 들어 켜기 끄기 헤드 라이트를 돌릴 수 있습니다. 회로의 TXD 및 RXD 접점은 송신기 및 수신기의 데이터 접점에 송신기 및 수신기의 데이터 접점에 연결되어 간단하고 거의 설명하지 않습니다. 스키마 자체의 공급 전압은 3.5-5 볼트이지만, 78L05 안정제를 설정 한 경우 전압 7 이상의 볼트에서 공급할 수 있습니다. 인쇄 보드는 옵션을 모두 제공하며, 오른쪽의 점퍼를 설치하면됩니다. 기계, 전원 및 수신기에서 사용하기 위해서는 안정제가없는 배터리에서 직접 송신기를 수행 할 수 있습니다. 각 구성표에는 마이크로 컨트롤러가 있습니다. 해당 펌웨어로 깜박이어야합니다. 펌웨어는 보드 파일과 함께 아카이브에 있습니다.
콘솔 제조
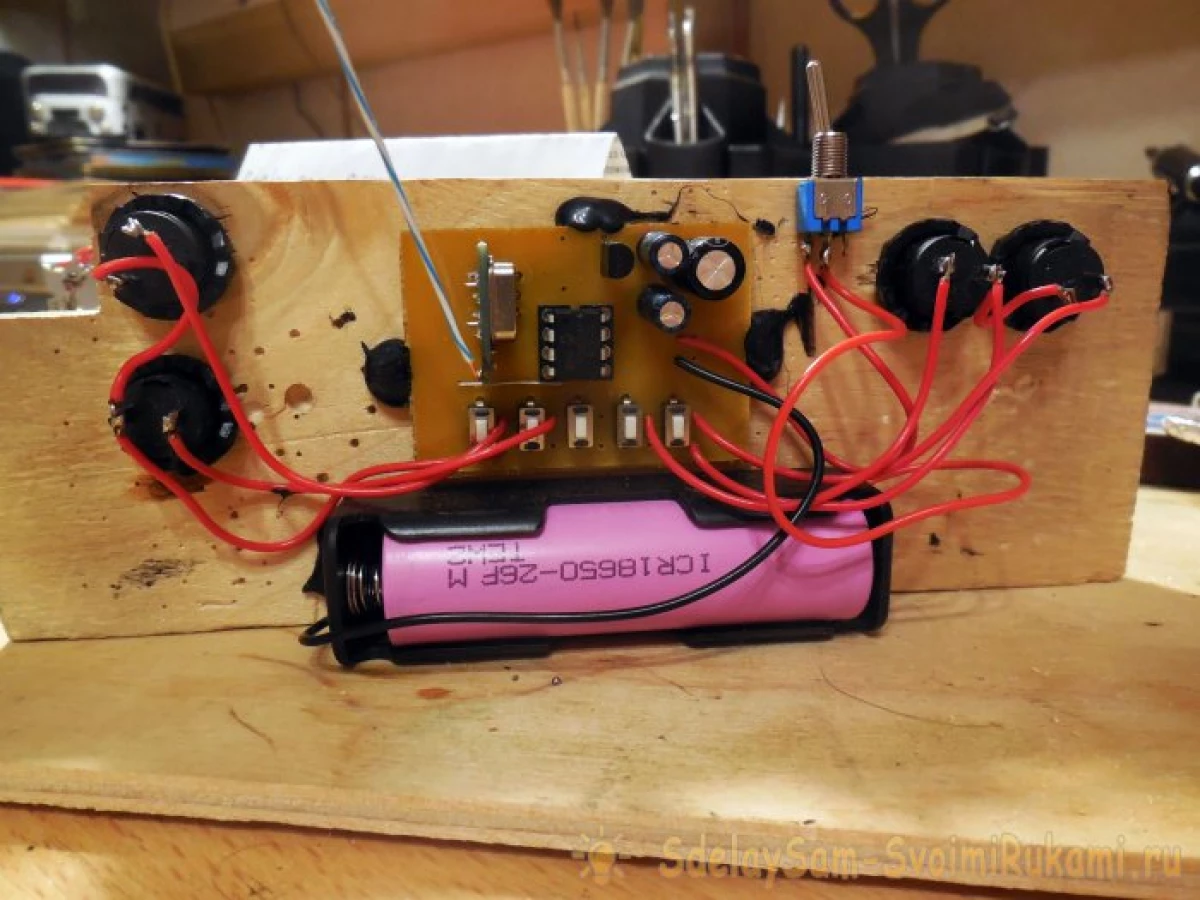
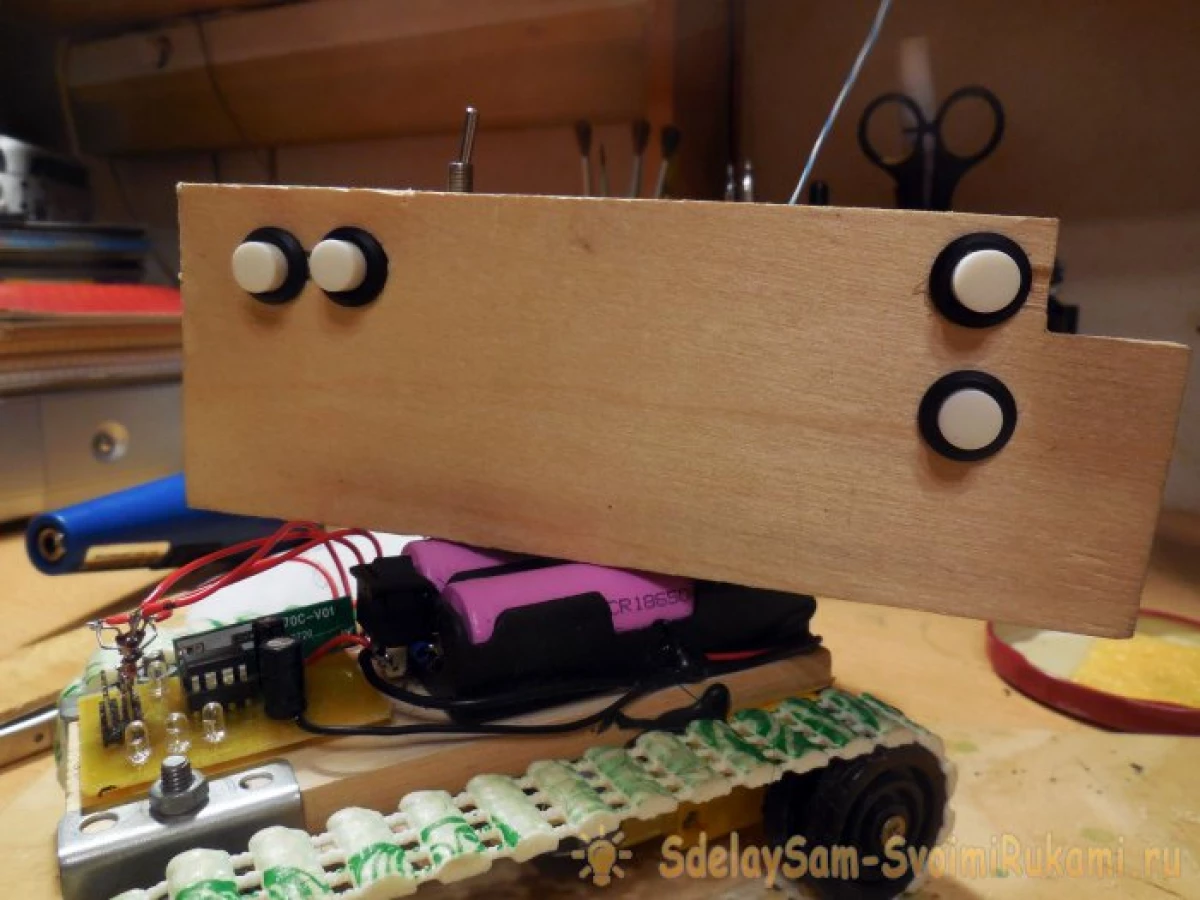
옵션 중 하나로서 인코더 보드를 설치하기 위해 충분한 공간이있는 경우 깨진 / 불필요한 무선 제어 장난감에서 완성 된 리모컨을 사용할 수 있습니다. 또는 내가 한 것처럼 자신의 리모컨을 만들 수 있습니다. 기초로서, 합판의 또 다른 절단, 배터리 18650의 IT 홀더, 수신기 모듈의 코더 수수료, 4 개의 버튼은 컨트롤을 최대화하도록 배치합니다. 코더 보드에는 이미 보드의 탑승지가 포함되어 있습니다. 조립 후 성능 테스트를 제외하고는 설치가 선택 사항입니다. 작동 버튼은 아래의 사진과 같이 전선의 보드에서 표시됩니다.
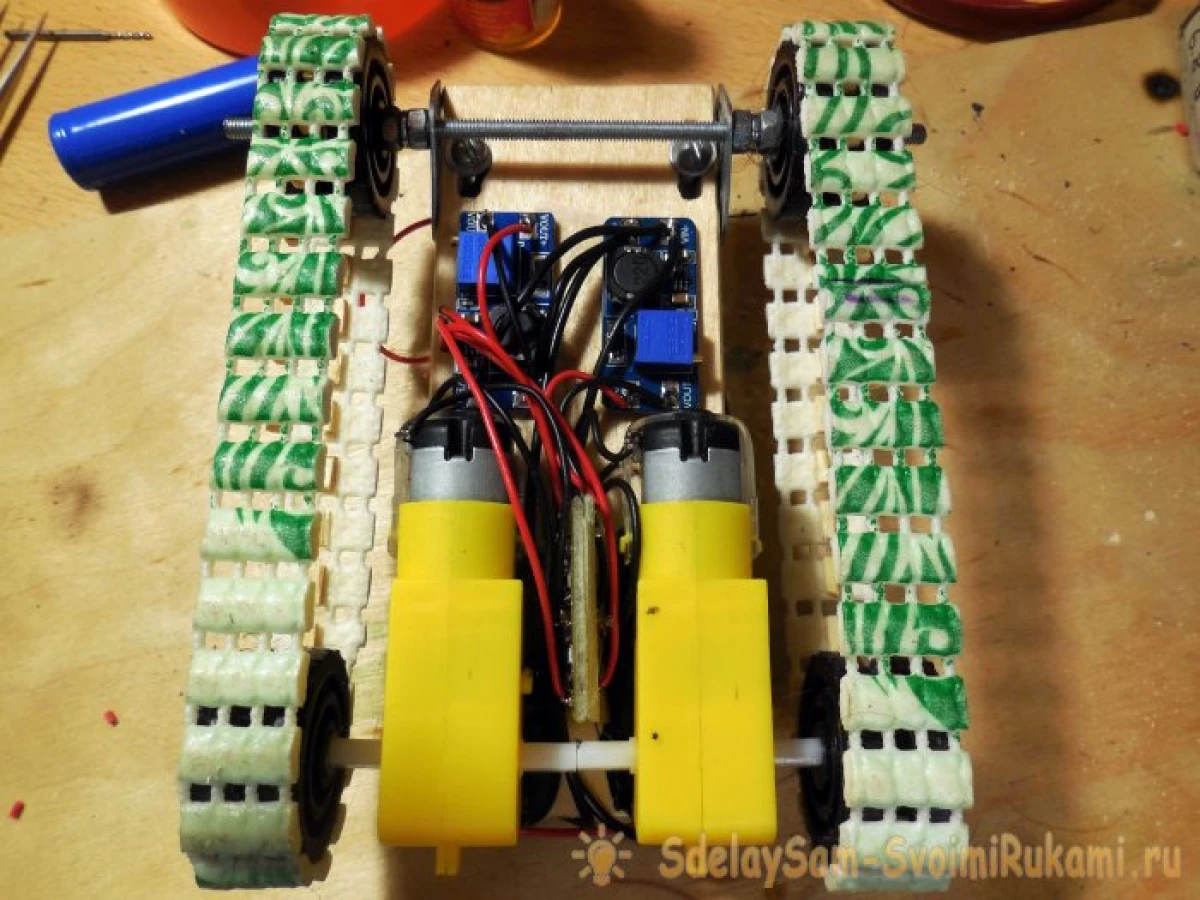
섀시에 전자 제품 설치
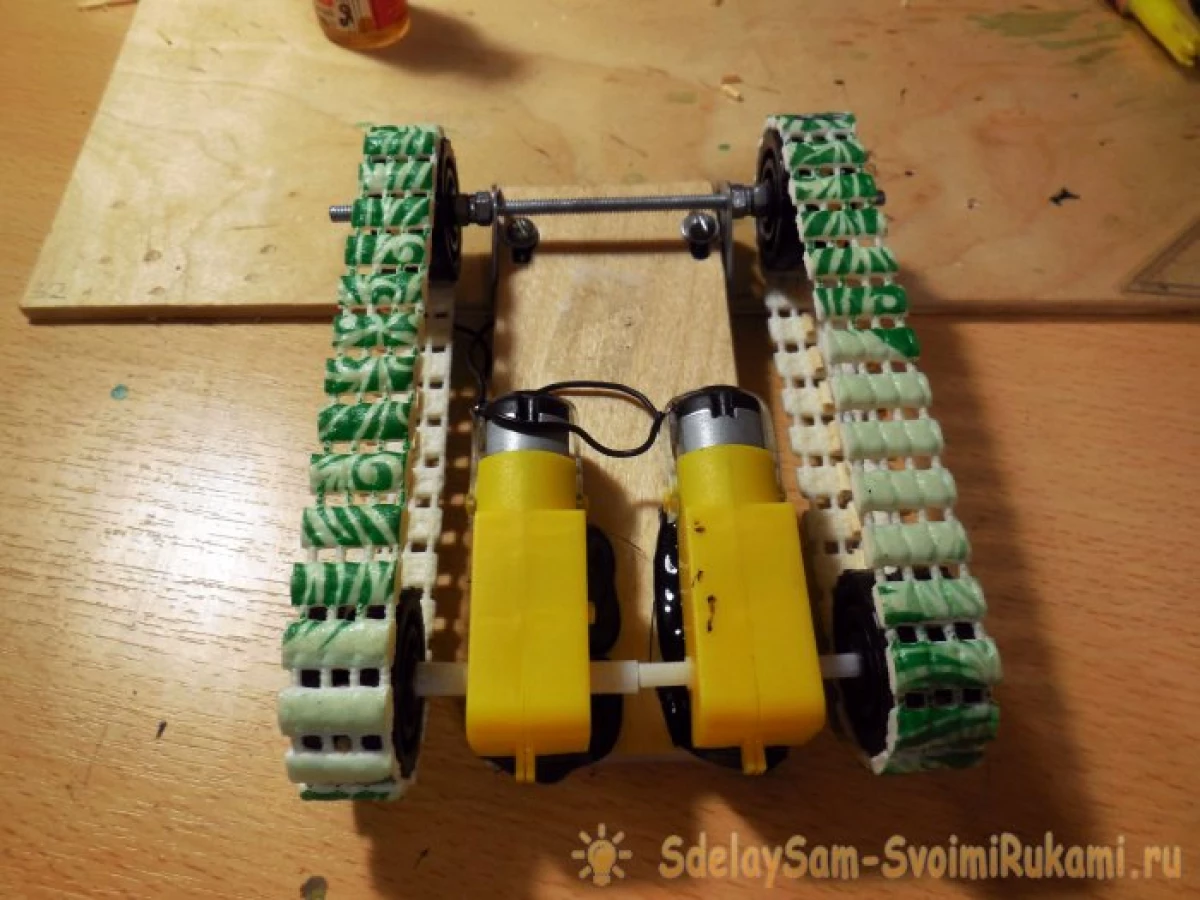
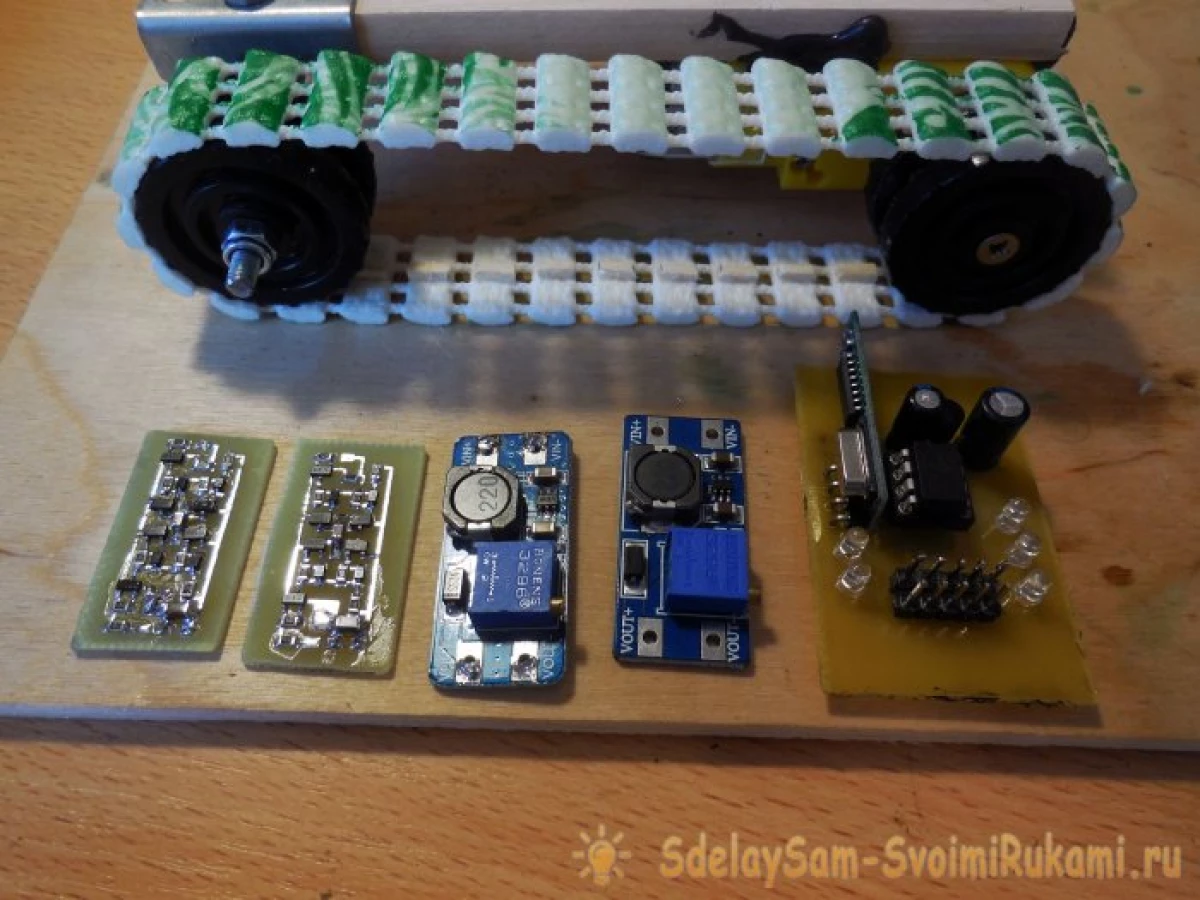
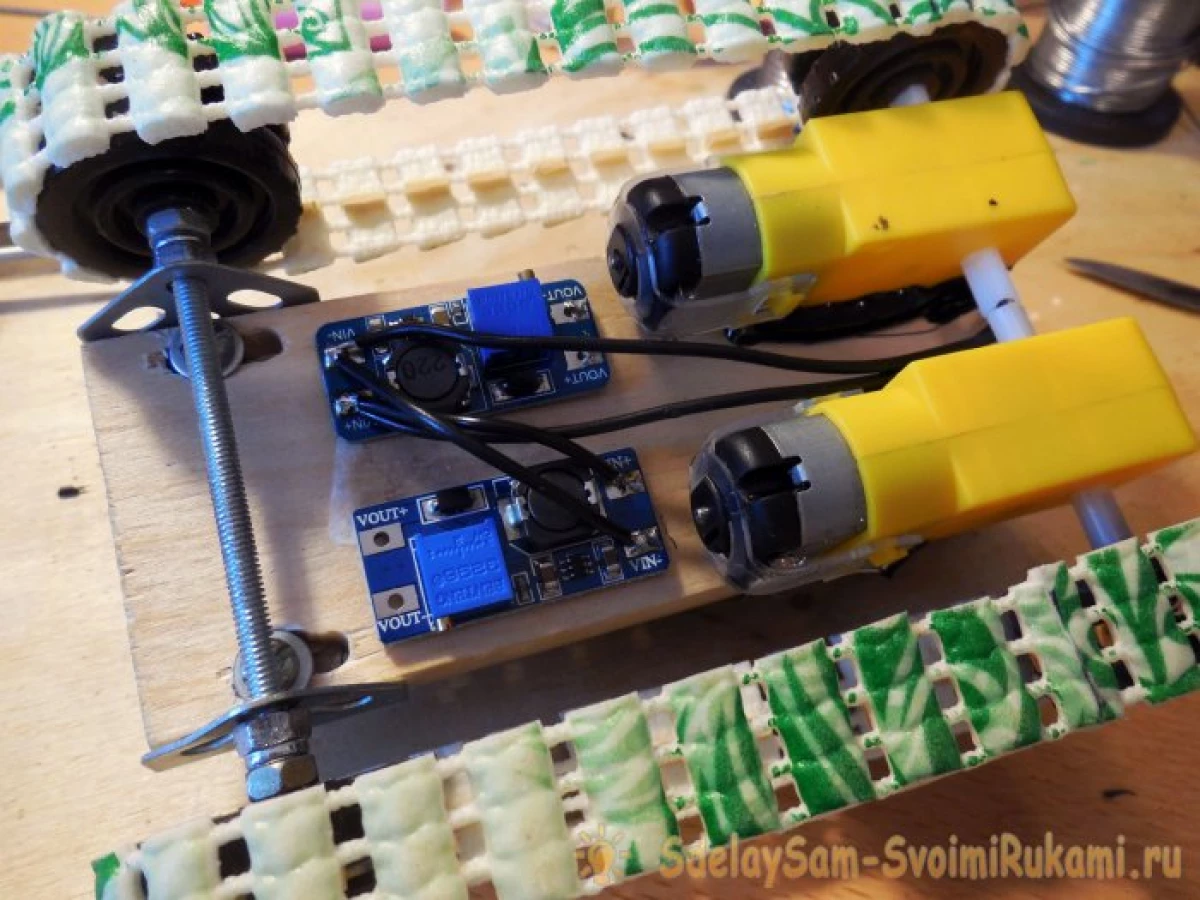
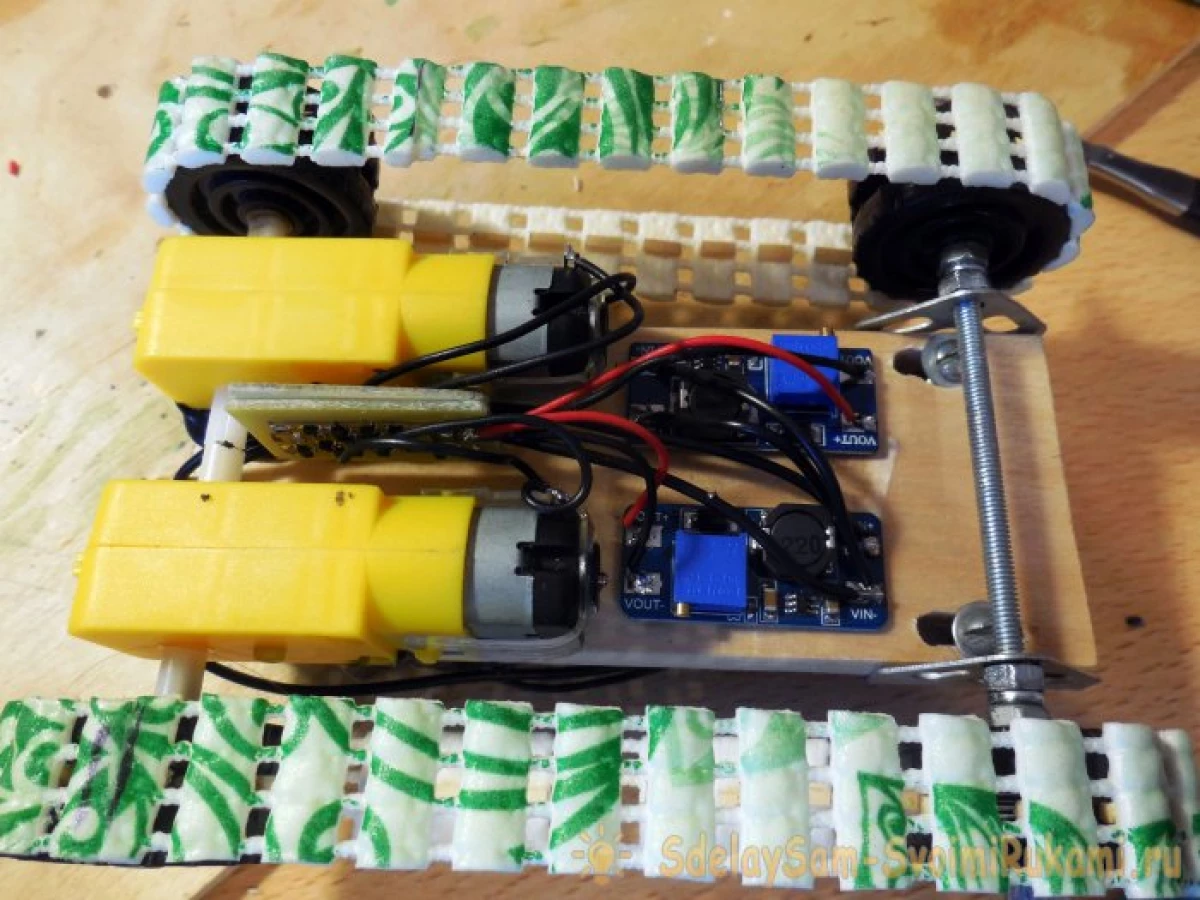
따라서 섀시 자체에서 수신기 모듈이있는 디코더 보드 외에도 2 개의 "브리지"보드가 설치되고 두 개의 컨버터가 설치됩니다. 각 모터마다 하나씩 하나씩 하나씩 하나씩 사용하는 것은 각 애벌레의 속도를 조정할 수 있기 때문에 좋습니다. 모터 기어는 동일하지만 여전히 파라미터의 변화가 있지만 동일한 공급 전압으로도 약간 다른 회전을 줄 수 있으므로 컨버터 출력에서 전압을 조정할 수 있습니다. Skotsky는 Speeds, Sights에서는 기계가 엄격하게 앞으로 나아갈 것이 아니라 작은 차례가 될 것이라는 사실로 이어질 것입니다. 아래 섀시에 설치하는 데 필요한 모든 보드를 볼 수 있습니다.
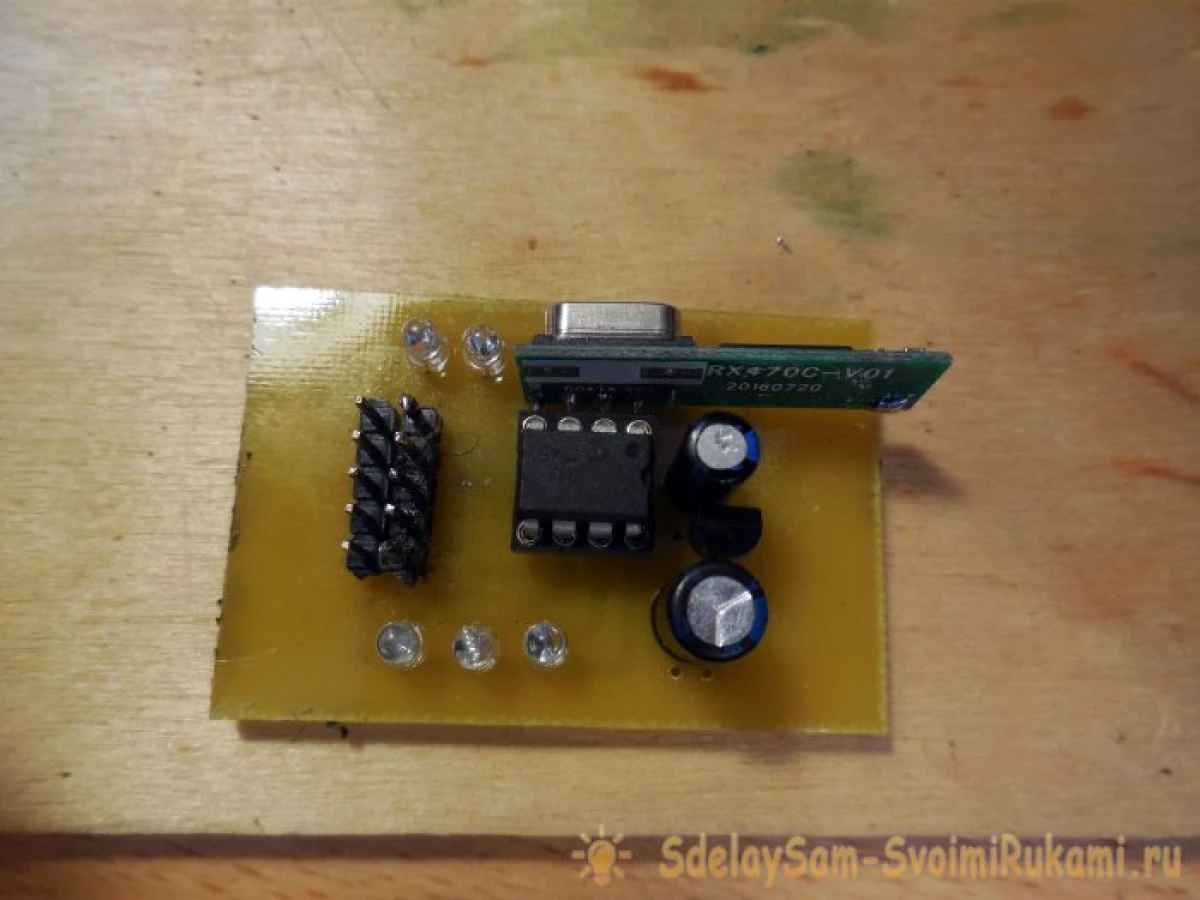
디코더 보드의 자세한 사진. 코더 보드와 마찬가지로 몇 가지 추가적인 전원 커패시터가 있습니다. 마이크로 컨트롤러가있는 장치에서는 불필요한 것이 아닙니다.
다리 계획을 세우십시오
그것은 모터의 전압을 공급하기위한 열쇠의 도움으로 만 충분하기 때문에 어떤 종류의 다리가 필요하기 때문에 어떤 종류의 다리가 필요합니다. 그리고 타자기가 반전이 필요하지 않은 경우에는 실제로 필요하지 않습니다. 연습은 그것이 없으면 완전히 끊임없이 흥미로운 것을 보여줍니다. 따라서, 모터에 대한 극성 변화를 제공하는 작은 추가 방식을 조립할 필요가있다. Polarism 변경 - 이동 방향이 변경됩니다.
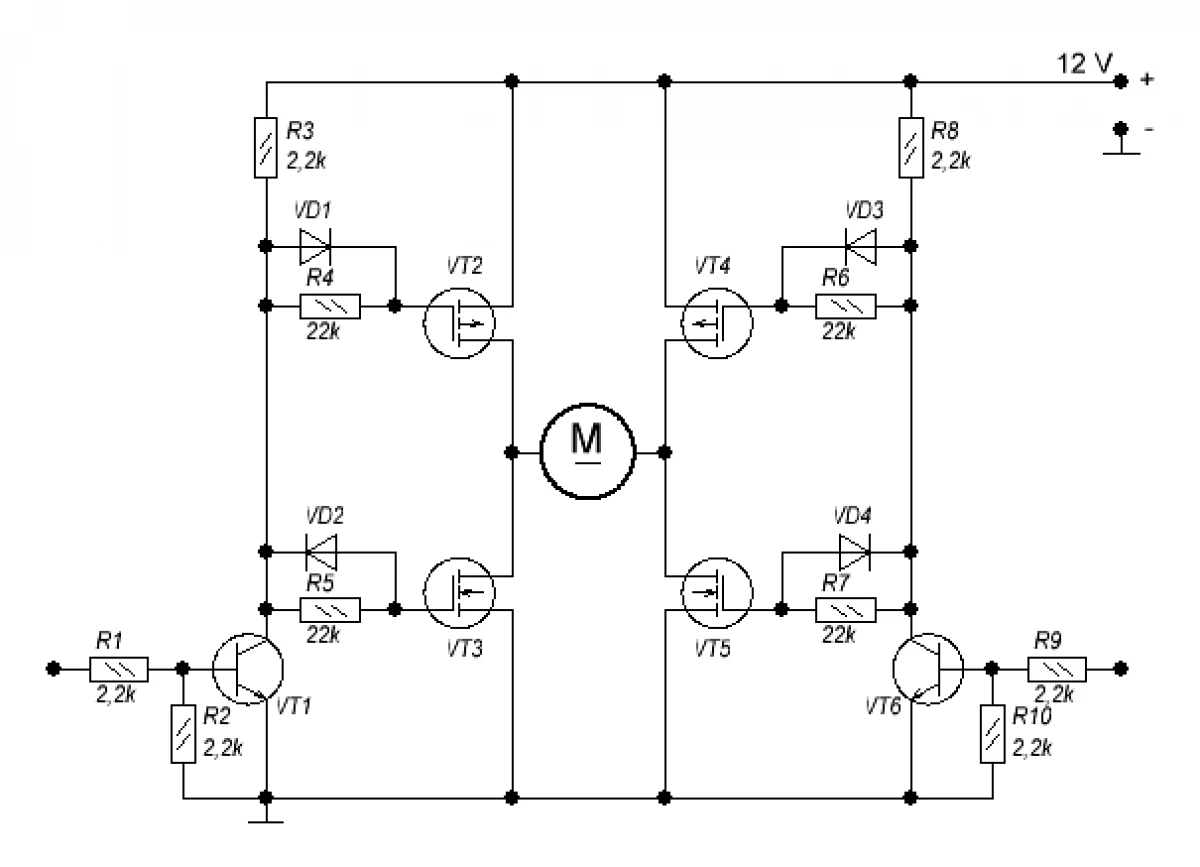
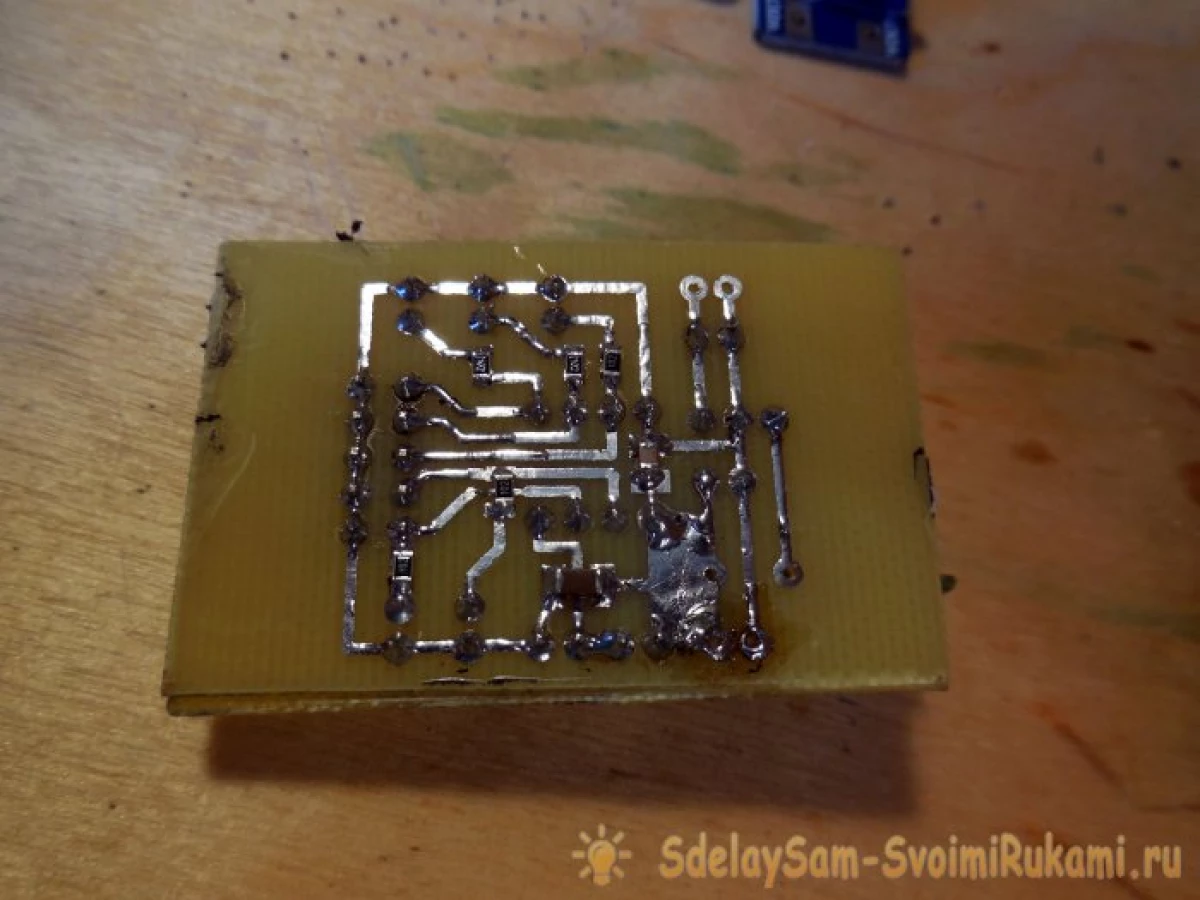
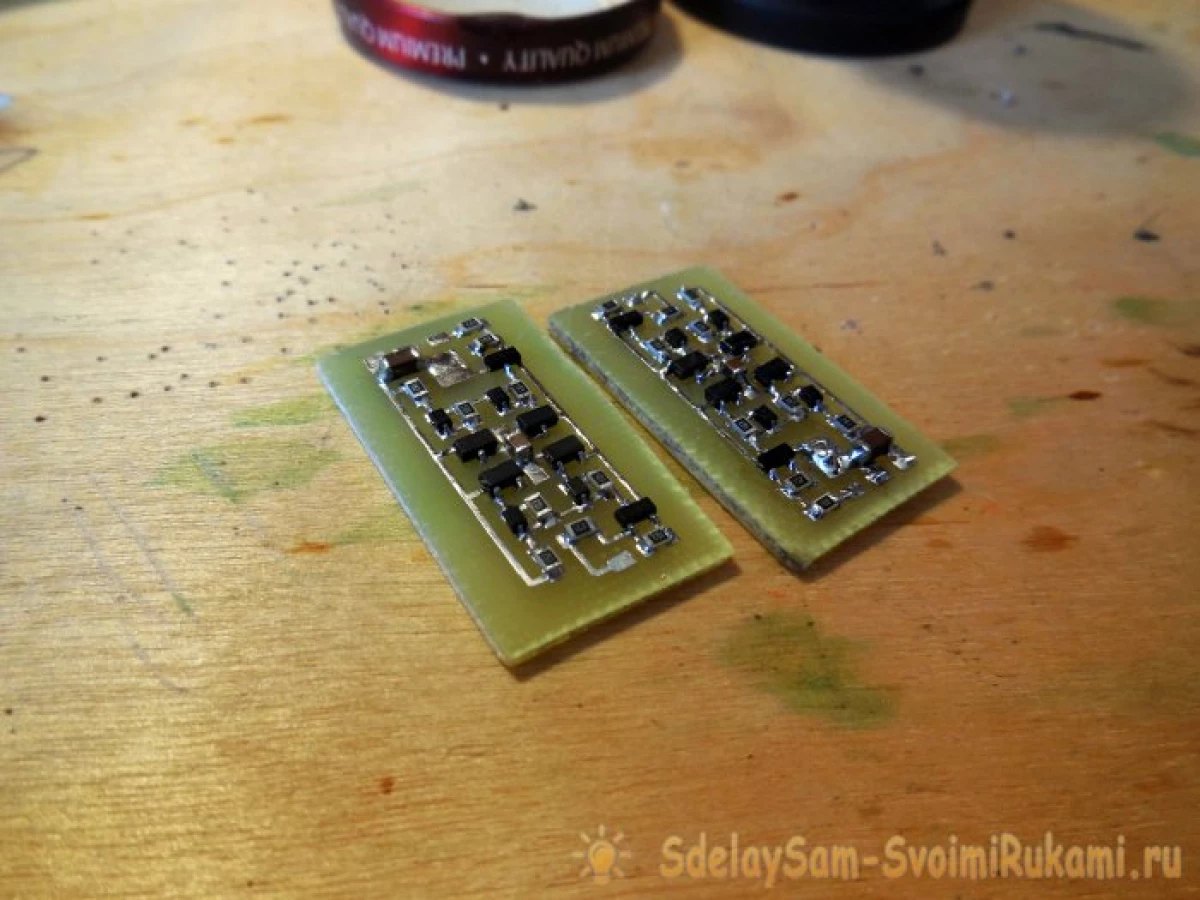
엔진 이이 방식에 연결되어 있으며, 2 개의 입력 - IN1 및 IN2, 3-5 볼트가 하나의 입력에 제출되었습니다. 엔진이 한 방향으로 회전하고 3-5 볼트가 다른 한 방향으로 제출되었습니다. 측면. 전압이 모든 입력을 제공하지 않거나 두 입력 모두에게 즉시 제공되는 경우 모터가 회전하지 않으므로 작업의 간단한 논리입니다. 이 다이어그램에는 모터를 전환 할 4 개의 필드 트랜지스터가있어 충분히 큰 전류로 계산되어야합니다. 둘 중 두 개는 n 채널이며, AO3400, 다른 두 개의 P-Channels, 적합한 AO3401을 사용할 수 있습니다. 또한 다이어그램에서 두 개의 바이폴라 NPN 트랜지스터가 있으며, BC847은 적합하거나 다른 유사한 것입니다. 섀시에 많은 공간을 취하지 않으려면 SMD 구성 요소 에이 구성표를 조합하는 것이 좋습니다. 다이오드는 예를 들어 1N4148W와 같습니다. 이 구성표의 전원 입력 (12V로 지정)에서 컨버터의 전압이 제공됩니다. 왼쪽 및 오른쪽 모터의 경우 두 개의 사본으로 구성표를 수집해야합니다. 이는 두 번째 변환기에서 그에 따라 전원이 공급됩니다. 수집 된 회로 기판의 사진.

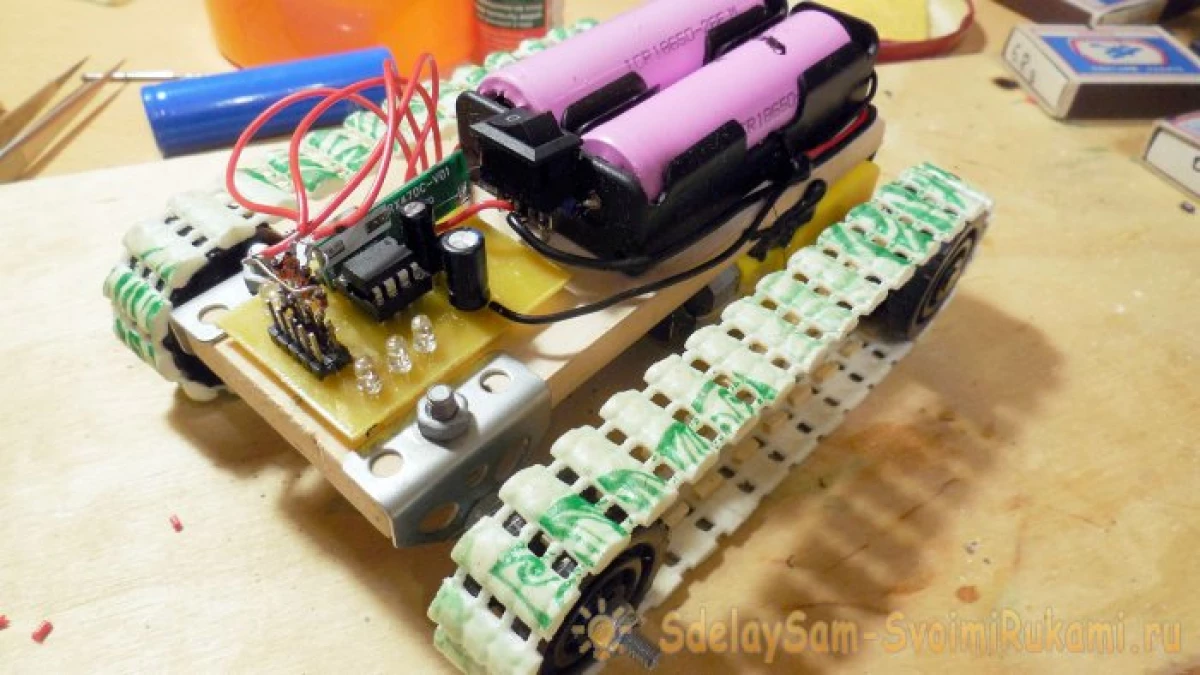
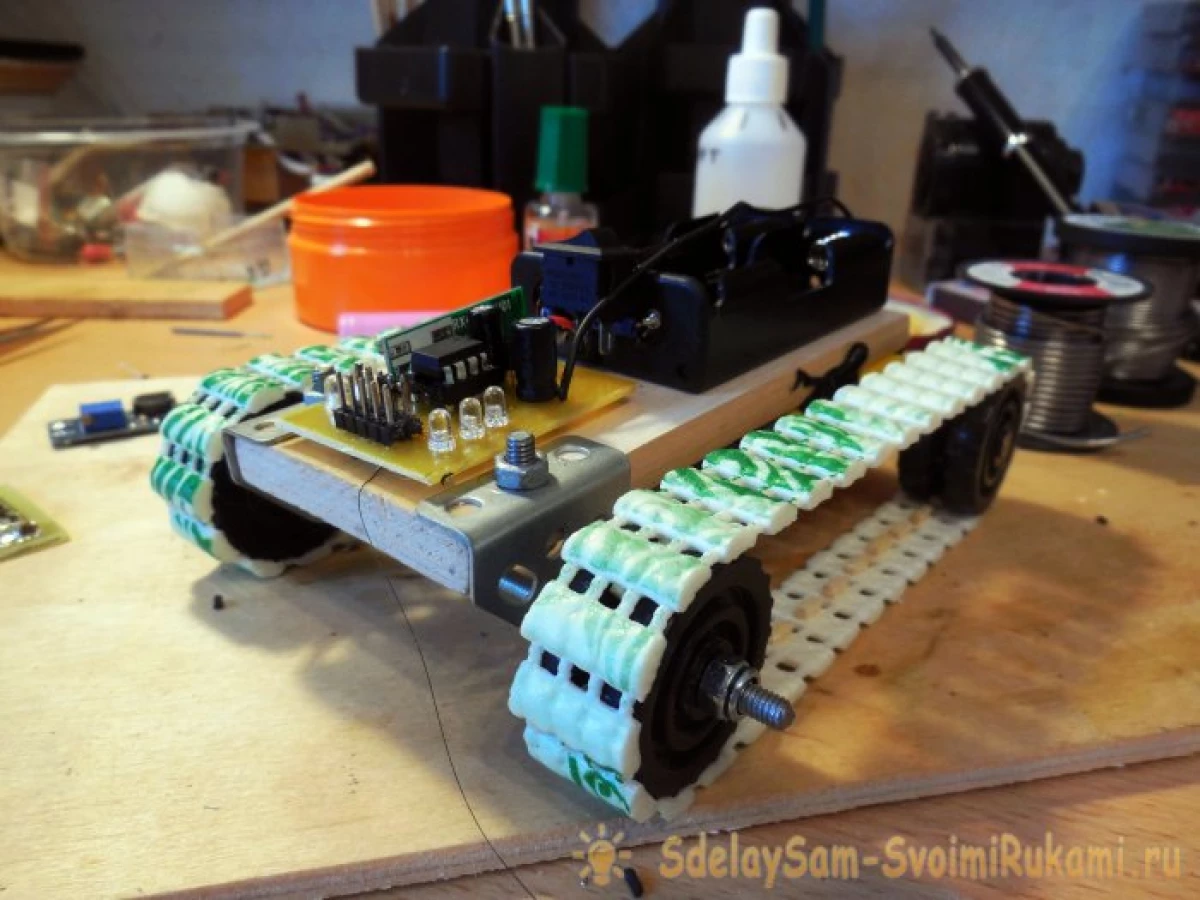
이제 직접 설치로 진행할 수 있습니다. 18650 건전지의 섀시 상단에 몇 가지 보유를 설치하는 가치가있는 경우 모든 전자 장치가 전원이 공급되면 배터리가 병렬로 연결됩니다.

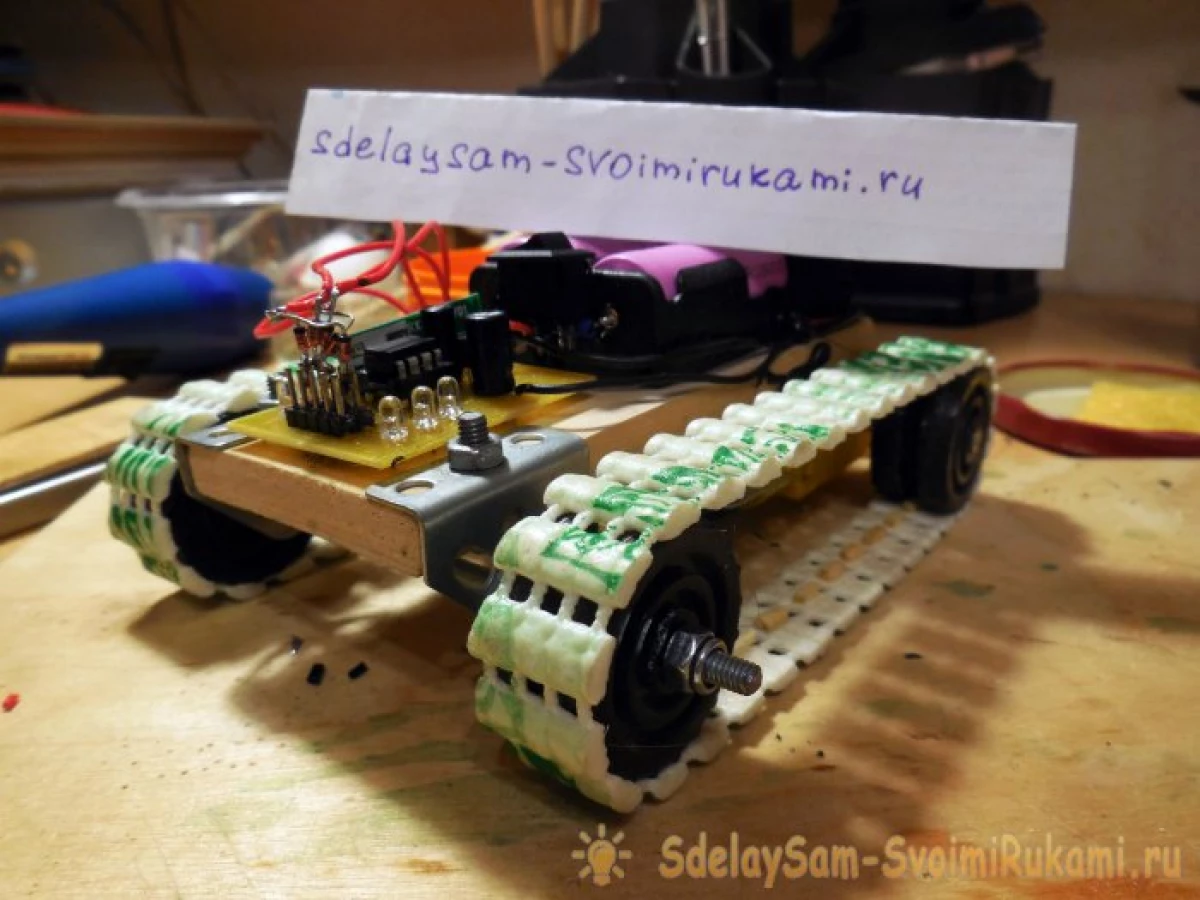
배터리 앞에 디코더 앞에서 디코더 보드가 설치되어 있으면 즉시 스위치를 통해 홀더 연락처로 연결할 수 있습니다. 편의상 5 개의 LED 가이 보드에 설치됩니다. 원격 키를 누를 때 해당 LED가 켜집니다.
하부의 섀시 아래에서 한 쌍의 컨버터와 한 쌍의 폰이 부착됩니다. 즉시 모든 것이 전선으로 연결됩니다 - 전환기를 통해 컨버터의 입력, 변환기의 출력 및 브릿지의 보드 및 브리지의 출력을 모터에 이미 제공합니다. 로드중인 모터는 각각 변환기의 입력에서 각각 상당히 높은 전류를 섭취 할 수 있으며, 소비 된 전류는 약 2 배 더 높고 일부 포인트는 1-1.5 앰프에 도달 할 수 있으므로 필요합니다. 공급 전원 충분히 두꺼운 와이어.
마지막으로 최종 조립 단계는 남아 있습니다. 디코더의 출력 (in1, in2)의 입력에 디코더의 출력을 연결해야하므로 장치를 누르면 장치가 반응하여 원하는 방식. 즉:
- "전방"을 누르면 두 엔진이 한 방향으로 회전합니다.
- "뒤로"를 누르면 두 엔진이 반대 방향으로 회전합니다.
- "오른쪽"을 누르십시오 - 왼쪽 모터가 앞으로 회전하고, 오른쪽으로 회전하면 시계 방향으로 지점에서 기계가 발생합니다.
- "왼쪽"을 누르면 오른쪽 모터가 뒤로 회전하고 앞으로 나아가면 기기가 반 시계 방향으로 펼쳐집니다.
- "앞으로"및 "오른쪽"의 동시에 누르면 왼쪽 모터가 앞으로 회전하면 올바른 일은 그 자리에 서서 부드러운 회전이 발생합니다.
- 동시에 "앞으로"및 "왼쪽"- 유사하게, 그러나 다른 방식으로
이러한 논리를 구현하려면 아래 그림과 같이 디코더의 출력을 브리지 입력으로 연결해야합니다.
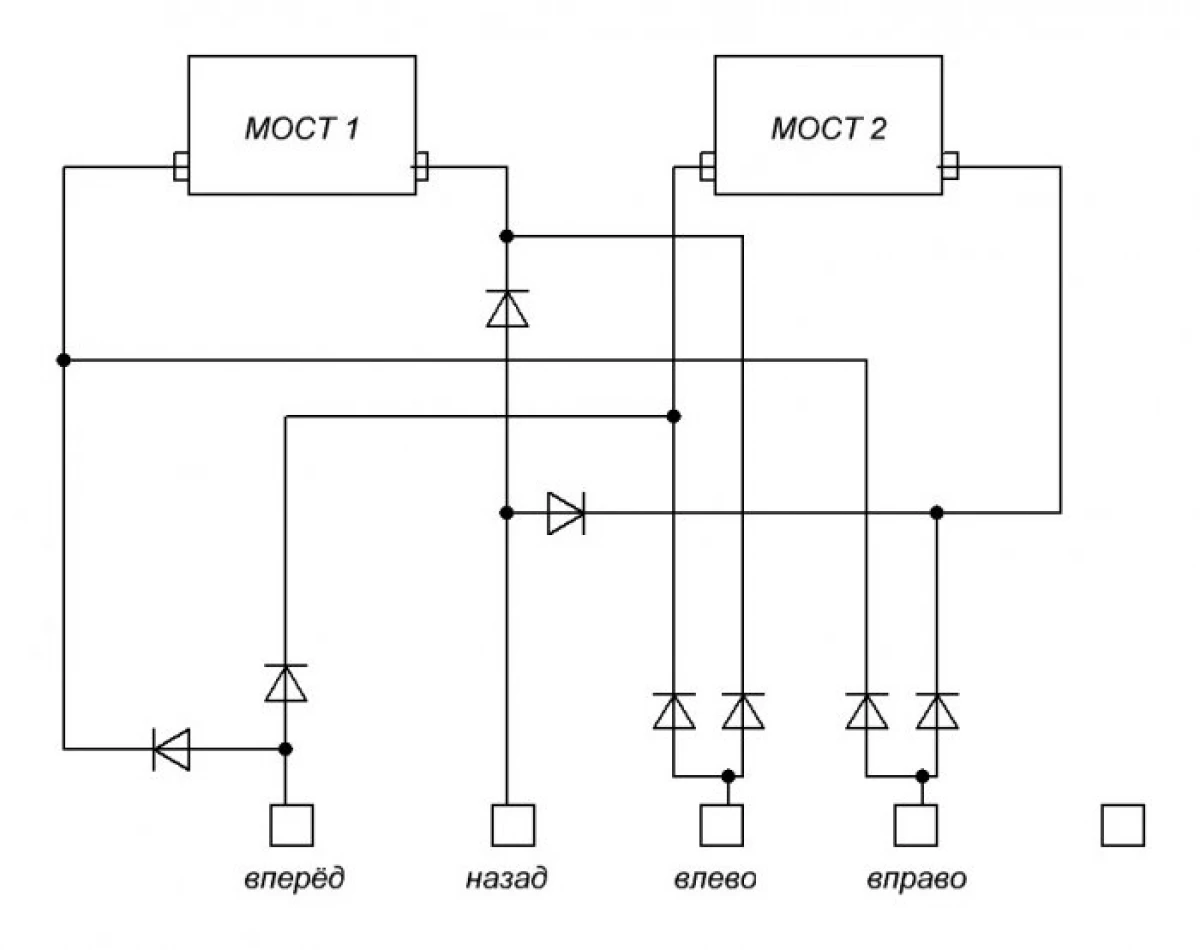
디코더의 바닥은 아래에 나와 있으며 그 중 하나는 무료이며 다른 작업에 사용할 수 있습니다. 다이오드 여기에서는 동일한 1N4148을 사용하여 디코더의 출력에 오른쪽에 장착하여 납땜됩니다.
테스트
이 컴퓨터에서 완료되면 배터리를 삽입하고 작업을 확인할 수 있습니다. 동시에, 소비 전류를 확인하는 것은 불필요하지 않을 것입니다. 콘솔의 팀이 없을 때, 그것은 약간 수십 mA의 팀이되어야합니다. 콘솔의 거리는 사용 된 수신 모듈과 송신기에 따라 달라집니다. 대부분 기계를 제어 할 수있을만큼 도시 조건에서 약 20-30m의 약 20-30m의 영역을 제공합니다. 안테나의 범위를 크게 증가시키는 데 도움이 될 것이며, 길이가 17cm (433MHz의 빈도) 및 솔더가 "Ant"연락처에 납땜을 할 수 있습니다.
따라서 어린이와 어른들을위한 매우 바쁜 장난감을 밝혀 냈습니다. PVC-RUG 애벌레는 모든 표면을 가진 훌륭한 클러치를 제공하므로 장애물을 쉽게 극복합니다. Caterpillar 옵션의 장점은 제어의 단순성에 기인 할 수 있습니다. 추가적인 조향 메커니즘을 설치할 필요가 없을 필요가 없으며 트랙의 회전 방향의 변화로 만 발생합니다. 묘사 된 디자인 섀시가 작은 "도로 통관"이라고 할 수 있습니다. 모터는 바닥 아래에 있으며 많은 공간을 차지하고 운전의 즐거움을 방해하지 않으며 원하는 경우이 부족한 경우 후방 휠에 대한 추가 축을 추가하고 위에서 모터를 배치하여 제거 할 수 있습니다. 성공적인 조립!